Lesson 12 Basic Geometry for Physics
“The essence of mathematics lies in its freedom.” Georg Cantor
Geometry is the archetype of the beauty of the world.” Johannes Kepler
Introduction
Fresh from mastering logic and proof we will use our new language to investigate geometry, where we will learn the spatial language that bridges rigorous mathematical reasoning with the physical universe. This lesson transforms geometry into a precise tool for theoretical physics. Geometry is not just about shapes—it’s the framework for describing motion, forces, and the structure of space itself. Here, we’ll explore points, lines, planes, angles, and theorems with formal rigor, grounding each concept in axioms and logical deductions. Using the Wolfram Language, we’ll perform calculations, create dynamic visualizations, and model physical systems like optics and crystal structures. By blending formal proofs with practical applications, you’ll see geometry as the blueprint of the cosmos, equipping you to reason, compute, and innovate in physics.
Points, Lines, and Planes
In Euclidean geometry, we begin with the most fundamental ideas that serve as the building blocks for all spatial reasoning. These elements are accepted without formal definition in axiomatic systems, as explored in Lesson 11, allowing us to derive more complex structures through logic and proof.
Consider a precise location in space that has no size or extent—it represents an idealized position, such as the exact spot of a particle at rest. This concept is essential in physics for modeling point masses or instantaneous positions in motion. We call such a location a point. It is important to note that we cannot use a coordinate axis to represent a point, we say it has zero dimensions.
Next, imagine a perfectly straight path that stretches without end in both directions, formed by connecting any two such points. This path captures the idea of direction and infinite extension, useful in physics for describing trajectories of objects or the propagation of light. We call such an object a line. As we have seen since Lesson 3, a line can be represented by a single coordinate axis, it is thus one dimensional.
Finally, envision a flat surface that extends infinitely in all directions within two dimensions, determined by three points that do not lie along the same line. This surface models ideal planes in physics, such as the face of a mirror We call this kind of object a plane. As we have noted above it requires two coordinate axes to model this, it is thus two dimensional.
These primitives form the foundation of geometry, enabling logical deductions and applications in theoretical physics.
A collection points, all on the same line, are what we call collinear. Points not on the same line are called non-collinear.
A collection of points all on the same plane are called coplanar.
In this figure we see that the red and blue points are collinear and all three are coplanar.
Undefined Terms
Term 12.1 Point: A location in space with no dimension, denoted by a capital letter (e.g., A), modeling particles or positions.
Term 12.2 Straight: A path that has no curves, wiggles, , or breaks—it thus follows a single unvarying direction.
Term 12.3 Line: A one-dimensional, straight path extending infinitely in both directions, defined by two points (e.g., ![]() ).
).
Term 12.4 Plane: A two-dimensional, flat surface extending infinitely, defined by three non-collinear points.
Formal Definitions
Definition 12.1 Collinear Points: Points that lie on the same line.
Definition 12.2 Non-Collinear Points: Points that do not lie on the same line.
Definition 12.3 Coplanar Points: Points that do not lie on the same plane.
Definition 12.4 Intersection Point: The point where two lines meet, or where a line meets a plane so long as the line does not lie entirely within the plane.
Definition 12.5 Containment: The condition where a line lies entirely within a plane, meaning all its points are coplanar with the plane.
Axioms
The Greek mathematician Euclid (300 BC-270 BC) is attributed with developing the following three axioms (in all likelihood, he compiled them):
Axiom 12.1 The Existence of Points: Points exist.
Axiom 12.2 Euclid’s First Axiom of Geometry: A straight line can be drawn that connects any two points. This is sometimes written, given any two distinct points, there exists exactly one line containing both.
Axiom 12.3 Euclid’s Second Axiom: A finite straight line segment can be extended continuously in a straight line.
Axiom 12.4 Euclid’s Third Axiom: Three non-collinear points determine a unique plane. This is sometimes written, given any three non-collinear points, there exists exactly one plane containing all three.
Axiom 12. 5 The First Incidence Axiom: A line contains infinitely many points.
Axiom 12.6 The Second Incidence Axiom: A plane contains infinitely many points and infinitely many lines.
Axiom 12.7 The Third Incidence Axiom: If two points lie on a line, the line is unique.
Axiom 12.8 The fourth Incidence Axiom: If three non-collinear points lie on a plane, the plane is unique.
Axiom 12.9 Infinite Extension: Lines and planes extend infinitely in all directions (no endpoints or boundaries).
Principles
Principle 12.1: Points have zero dimensions—no size, no length, no area, no volume; purely location.
Principle 12.2: Lines have one dimension—length but no width or height; modeled by a single coordinate axis.
Principle 12.3: Planes have two dimensions—length and width but no thickness; modeled by two coordinate axes.
Principle 12.4: Collinear points lie on a single line; non-collinear points determine a unique plane.
Principle 12.5: Coplanar points lie on a single plane; non-coplanar points require three dimensions.
Principle 12.6: Geometry begins with primitives—point, line, plane, incidence.
Theorems
Theorem 12.1 Unique Line Theorem: Through any two distinct points, there passes exactly one line.
Proof of Theorem 12.1: According to Euclid’s First Axiom, “A straight line can be drawn from any point to any other point,” given two distinct points A and B, there exists at least one straight line, say ℓ, that passes through both points. This establishes that a line exists. To prove that only one such line exists, assume the contrary: suppose there are two distinct lines, ![]() and
and ![]() , both passing through points A and B. These lines must differ in some way. How can they differ? They must take different paths. Since
, both passing through points A and B. These lines must differ in some way. How can they differ? They must take different paths. Since ![]() and
and ![]() pass through the same points A and B, the required difference violates the technical term for straightness. This is a contradiction, so there cannot be two distinct lines the pass through the same pair of points. Thus, by Reductio Ad Absurdum, we have prove Theorem 12.1. Q.E.D.
pass through the same points A and B, the required difference violates the technical term for straightness. This is a contradiction, so there cannot be two distinct lines the pass through the same pair of points. Thus, by Reductio Ad Absurdum, we have prove Theorem 12.1. Q.E.D.
Theorem 12.2 Intersection Theorem for Lines and Planes: A line intersects a plane at most at one point unless it lies entirely within the plane.
Proof of Theorem 12.2: Consider a line L and a plane P. We aim to show that L intersects P at most at one point unless L lies entirely within P. We will perform a proof by cases. Case 1—Line L Lies Entirely in the Plane P: If L lies entirely within P, every point on L is in P. In this case, the line has infinitely many points of intersection with the plane, satisfying the theorem’s condition that the line lies within the plane. Case 2— Assume L does not lie entirely in P, meaning at least some points on L are not in P. Suppose L intersects P at two distinct points, A and B. By the Unique Line Theorem, there is exactly one line through points A and B, which is L, since A and B lie on L. Since A and B are also in P, the line L (which passes through A and B) must be contained in P. This is because a plane, being a flat surface containing all points defined by its lines (per the Axiom 12.3), includes any line through two of its points. By Euclid’s Second Axiom, 12.2, L is a straight line extending infinitely. If L contains A and B in P, and is straight, all points on L must lie in P, as the plane extends infinitely and includes the entire straight line defined by A and B. This contradicts the assumption that L does not lie entirely in P, since having two points in P implies the entire line L lies in P. If L intersects P at two points, it must lie entirely in P. If L is not entirely in P, it cannot intersect P at two points without contradicting the straightness and flatness properties. Thus, L intersects P at most at one point (e.g., a single point of intersection) unless it lies entirely within P. So, using Reductio ad Absurdum, the assumption of more than one intersection point (when the line is not in the plane) leads to a contradiction. Therefore, a line intersects a plane at most at one point unless it lies entirely within the plane. Q.E.D.
Theorem 12.3 Unique Plane Theorem: Three non-collinear points determine exactly one plane.
Proof of Theorem 12.3: Here we will first prove existence, and then we will prove uniqueness. Existence: By Axiom 12.3 , three non-collinear points A, B, and C determine a plane P. Thus, there exists at least one plane containing A, B, and C. Uniqueness: To prove that only one such plane exists, assume the contrary: suppose there are two distinct planes, ![]() and
and ![]() , both containing points A, B, and C. Since A and B are distinct points, by the Unique Line Theorem, there is exactly one line,
, both containing points A, B, and C. Since A and B are distinct points, by the Unique Line Theorem, there is exactly one line, ![]() , passing through A and B. Both planes
, passing through A and B. Both planes ![]() and
and ![]() must contain
must contain ![]() , as A and B lie in both planes. Similarly, there is a unique line
, as A and B lie in both planes. Similarly, there is a unique line ![]() through B and C, and a unique line
through B and C, and a unique line ![]() through C and A. Both
through C and A. Both ![]() and
and ![]() must contain
must contain ![]() and
and ![]() , since B and C, and C and A, are in both planes. Since A, B, and C are non-collinear (as given), they do not all lie on a single line. Thus, the lines
, since B and C, and C and A, are in both planes. Since A, B, and C are non-collinear (as given), they do not all lie on a single line. Thus, the lines ![]() , and
, and ![]() are not all coincident and span a two-dimensional space, as they connect three points that do not lie on a single line. A plane in Euclidean geometry is a flat, two-dimensional surface extending infinitely (per the definition of a plane). Since
are not all coincident and span a two-dimensional space, as they connect three points that do not lie on a single line. A plane in Euclidean geometry is a flat, two-dimensional surface extending infinitely (per the definition of a plane). Since ![]() and
and ![]() both contain A, B, and C, they contain the lines
both contain A, B, and C, they contain the lines ![]() ,
, ![]() , and
, and ![]() , which define the two-dimensional space determined by these non-collinear points. If
, which define the two-dimensional space determined by these non-collinear points. If ![]() and
and ![]() are distinct, they must differ in some way, such as containing different additional points or having different orientations. However, since both planes contain the same three non-collinear points A, B, and C, they span the same two-dimensional space. In Euclidean geometry, a plane is uniquely defined by three non-collinear points (as stated in the Plane Determination Axiom), and any plane containing these points must include all points on the lines through them and their extensions. Now, suppose
are distinct, they must differ in some way, such as containing different additional points or having different orientations. However, since both planes contain the same three non-collinear points A, B, and C, they span the same two-dimensional space. In Euclidean geometry, a plane is uniquely defined by three non-collinear points (as stated in the Plane Determination Axiom), and any plane containing these points must include all points on the lines through them and their extensions. Now, suppose ![]() contains a point D that is not in
contains a point D that is not in ![]() . Since
. Since ![]() contains A, B, and C, and D is in
contains A, B, and C, and D is in ![]() , the line
, the line ![]() (by Euclid’s First Axiom) lies in
(by Euclid’s First Axiom) lies in ![]() . However, since A is also in
. However, since A is also in ![]() , where
, where ![]() is a plane containing A, B, and C, it must include all points defined by the lines through these points unless D lies outside the span of A, B, and C. But since A, B, and C are non-collinear, they define the entire two-dimensional plane, and any point D in
is a plane containing A, B, and C, it must include all points defined by the lines through these points unless D lies outside the span of A, B, and C. But since A, B, and C are non-collinear, they define the entire two-dimensional plane, and any point D in ![]() must also lie in
must also lie in ![]() , as both planes are determined by the same three points. Thus,
, as both planes are determined by the same three points. Thus, ![]() and
and ![]() cannot contain different points or differ in orientation without violating the flatness and infinite extension of planes. This leads to a contradiction, as
cannot contain different points or differ in orientation without violating the flatness and infinite extension of planes. This leads to a contradiction, as ![]() and
and ![]() must be the same plane. This implies that the assumption that two distinct planes exist through A, B, and C is impossible (using reductio ad absurdum). Therefore, three non-collinear points determine exactly one plane.
must be the same plane. This implies that the assumption that two distinct planes exist through A, B, and C is impossible (using reductio ad absurdum). Therefore, three non-collinear points determine exactly one plane.
Exercise 12.1: Begin with Term 10.1 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each term, definition, axiom, principle, theorem, and proof.
Exercise 12.2:
a) Is there anything wrong with this conjecture? Conjecture 12.1 Line Containment: A line that contains two points of a plane either lies entirely within the plane or intersects the plane at exactly one point.
b) Prove the conjecture: Conjecture 12.2 turning it into Theorem 12.4 Point-Line Incidence Theorem: A point not on a line determines a unique plane with that line, provided the point and line are not coincident.
Measuring Line Segments
Having established the foundational elements of points, lines, and planes, we now turn to quantifying the space between points on a line. Imagine two distinct positions on a straight path; the separation between them can be measured using a consistent scale, allowing us to assign a positive value that represents how far apart they are. This measurement is fundamental in physics for describing displacements, velocities, or forces along a direction.
To make this precise, we introduce a way to assign real numbers to points on a line, such that the separation is the absolute value of the difference of these numbers. This assignment must satisfy certain conditions to ensure consistency across the geometry.
Next, consider the ability to place this scale starting from any two points, setting one to zero and the other to a positive value equal to their separation. This flexibility allows us to measure relative positions accurately.
On a line, a point may lie between two others, meaning it divides the line into two parts whose measurements add up to the total separation. The portion of the line between two points forms a bounded segment, with a defined measurement called its length.
Segments with the same measurement are equivalent in size, a concept that extends to combining such segments end to end, preserving equality. A half-line starting from a point and extending infinitely in one direction, called a ray, is useful for directing measurements.
We can divide a line into parts using points, creating segments that sum to the whole. Given a starting point and a direction, we can locate a unique point at a specified measurement along that direction. Finally, a point that divides a segment into two equal parts, or the process of splitting it equally, provides symmetry in measurements.
These concepts enable us to measure and manipulate geometric objects with precision, essential for physical applications like calculating distances in motion or partitioning space in models.
Undefined Terms
Term 12.5 Betweenness: The primitive relation where a point C lies on the line segment between two points A and B.
Term 12.6 Ray: A half-line starting at a point and extending infinitely in one direction.
Term 12.7 Line segment: The portion of a line between two distinct points (including the endpoints).
Formal Definitions
Definition 12.6 Distance between points (denoted AB): The positive real number representing the separation between two distinct points A and B on a line.
Definition 12.7 Betweenness: Point C is between points A and B on a line if the distance AC + CB = AB and C lies on the line segment AB.
Definition 12.8 Line segment AB: The portion of the line between points A and B, including A and B and all points between them; denoted AB.
Definition 12.9 Length (of a line segment): The positive real number equal to the distance between its endpoints.
Definition 12.10 Congruent segments (AB ≅ CD): Two line segments are congruent if they have the same length (AB = CD).
Definition 12.11 Ray ![]() : A half-line starting at point A and extending infinitely through point B and beyond, including A and all points beyond B in that direction; denoted AB.
: A half-line starting at point A and extending infinitely through point B and beyond, including A and all points beyond B in that direction; denoted AB.
Definition 12.12 Midpoint (of segment AB): The point M on segment AB such that AM = MB (equivalently, AM = MB = (1/2)AB).
Definition 12.13 Bisector (of segment AB): The act or result of dividing a line segment into two congruent parts using its midpoint.
Axioms
Axiom 12.10 Ruler Axiom: The points on a line can be placed in one-to-one correspondence with the real numbers such that the distance between two points is the absolute value of the difference of their corresponding numbers.
Axiom 12.11 Ruler Placement Axiom: Given two points P and Q on a line, a coordinate system can be chosen so that P is at 0 and Q is at a positive number equal to the distance PQ.
Principles
Principle 12.7: Distance is always positive. The separation between two distinct points is a positive real number.
Principle 12.8: Betweenness preserves distance additivity. If C is between A and B, then AC + CB = AB.
Principle 12.9: Line segments are bounded. A line segment AB includes exactly the points between A and B plus A and B.
Principle 12.10: Congruence of segments. Two segments are congruent if and only if they have equal length (AB ≅ CD ⇔ AB = CD).
Principle 12.11: Rays are unbounded in one direction. A ray ![]() starts at A and extends infinitely through B.
starts at A and extends infinitely through B.
Principle 12.12: Midpoint existence and uniqueness. Every line segment has exactly one midpoint M such that AM = MB = (1/2)AB.
Principle 12.13: Bisection. Dividing a segment at its midpoint produces two congruent segments.
Principle 12.14: Coordinate representation. Points on a line can be assigned real numbers consistently via the Ruler Axioms.
Principle 12.15: Distance is symmetric. AB = BA (order of points does not matter).
Theorems
Theorem 12.4 Point Plotting Theorem: If ![]() is a ray and d is a positive real number, then there is exactly one point P on ray
is a ray and d is a positive real number, then there is exactly one point P on ray ![]() such that A P = d.
such that A P = d.
Proof of Theorem 12.4: We will begin by proving the existence of the point d, and then we will show that it is unique. Existence Proof: Let ray ![]() be defined on a line with points A and B, where B determines the direction of the ray. By the Ruler Axiom, assign coordinates to the line such that the distance between points is the absolute difference of their coordinates. By the Ruler Placement Axiom, choose a coordinate system where A is at 0 and B is at a positive number b > 0 (since B is on the ray’s direction). The ray
be defined on a line with points A and B, where B determines the direction of the ray. By the Ruler Axiom, assign coordinates to the line such that the distance between points is the absolute difference of their coordinates. By the Ruler Placement Axiom, choose a coordinate system where A is at 0 and B is at a positive number b > 0 (since B is on the ray’s direction). The ray ![]() includes A (at 0) and all points with coordinates x ≥ 0 in the direction of B. For a positive real number d, choose point P with coordinate d (i.e., at x = d). The distance A P = |d - 0| = d, satisfying the condition that P is on ray
includes A (at 0) and all points with coordinates x ≥ 0 in the direction of B. For a positive real number d, choose point P with coordinate d (i.e., at x = d). The distance A P = |d - 0| = d, satisfying the condition that P is on ray ![]() (since d > 0).
(since d > 0).
Uniqueness Proof: Suppose there are two points P and Q on ray ![]() such that A P = A Q = d. By the Ruler Axiom, let A be at coordinate 0, and points on ray
such that A P = A Q = d. By the Ruler Axiom, let A be at coordinate 0, and points on ray ![]() have coordinates x ≥ 0. The distance A P = d means P has coordinate
have coordinates x ≥ 0. The distance A P = d means P has coordinate ![]() such that
such that ![]() , so
, so ![]() (since
(since ![]() on the ray). Similarly, A Q = d means Q has coordinate
on the ray). Similarly, A Q = d means Q has coordinate ![]() . Since both P and Q have the same coordinate d, they represent the same point (P = Q). If P and Q were distinct points with different coordinates, say
. Since both P and Q have the same coordinate d, they represent the same point (P = Q). If P and Q were distinct points with different coordinates, say ![]() and
and ![]() , then A Q = |e - 0| = e ≠ d, contradicting A Q = d. Thus, there is exactly one point P with A P = d.
, then A Q = |e - 0| = e ≠ d, contradicting A Q = d. Thus, there is exactly one point P with A P = d.
Conclusion: By direct proof, there exists exactly one point P on ray ![]() such that A P = d.
such that A P = d.
Theorem 12.5 Combining Congruent Segments Theorem: If A B ≅ C D and B C ≅ D E, then A C ≅ C E, assuming B is between A and C, and D between C and E.
Proof of Theorem 12.5: We sll prove this by direct proof. Assign coordinates via the Ruler Axiom: Place A at 0, B at p > 0, C at q > p. Since A B = p, B C = q - p, A C = q. For C D = A B = p, D E = B C = q - p, place C at r, D at r + p, E at r + p + (q - p) = r + q. Then C E = (r + q) - r = q = A C, so A C ≅ C E.
Theorem 12.6 Midpoint Theorem: Every line segment has a unique midpoint.
Proof of Theorem 12.6: By Theorem 12.4, we can establish that on on the segment A B with length d, the point M at d/2 from A on ray ![]() satisfies A M = M B = d/2. Uniqueness follows from the uniqueness in the Point Plotting Theorem.
satisfies A M = M B = d/2. Uniqueness follows from the uniqueness in the Point Plotting Theorem.
Exercise 12.3: Begin with Term 12.5 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each term, definition, axiom, principle, theorem, and proof.
Exercise 12.4:
a) Calculating Distance and Verifying Betweenness
Given points A, B, and C on a line with coordinates A(2), B(5), and C(8) assigned via the Ruler Axiom, compute the distances A B, B C, and A C. Use the definition of betweenness to determine if B lies between A and C. Explain why this satisfies the betweenness condition. In a physics context, if these points represent positions of a particle at times t=0, t=1, and t=2, what is the total displacement from A to C?
Hint: Use the Ruler Axiom to compute distances as absolute differences, and check if A B+B C=A C.
b) Constructing a Ray and Point Plotting
On a line, let point P be at coordinate 0 and point Q at coordinate 4, defining ray ![]() . Using the Point Plotting Theorem, find the coordinates of point R on ray
. Using the Point Plotting Theorem, find the coordinates of point R on ray ![]() such that P R=6. Verify the uniqueness of R using the Ruler Axiom. In a physics scenario, if ray
such that P R=6. Verify the uniqueness of R using the Ruler Axiom. In a physics scenario, if ray ![]() represents a particle’s path starting at P, and distance units are meters, where is the particle after traveling 6 meters? Use the Wolfram Language to plot points P, Q, and R, labeling the ray and distance.
represents a particle’s path starting at P, and distance units are meters, where is the particle after traveling 6 meters? Use the Wolfram Language to plot points P, Q, and R, labeling the ray and distance.
c) Congruence and Midpoint
Given a segment ![]() with length 10 units, find the coordinates of its midpoint M using the Midpoint Theorem, assuming X is at 0 and Y is at 10 on a line (via Ruler Placement Axiom). Verify that X M≅M Y. Use the Wolfram Language to plot segment
with length 10 units, find the coordinates of its midpoint M using the Midpoint Theorem, assuming X is at 0 and Y is at 10 on a line (via Ruler Placement Axiom). Verify that X M≅M Y. Use the Wolfram Language to plot segment ![]() and midpoint M, labeling lengths.
and midpoint M, labeling lengths.
Hint: Apply the Midpoint Theorem to find M, and check congruence by computing distances.
d) Partitioning a Line Segment
Consider segment ![]() with length 12 units, where S is at coordinate 0 and T at 12. Partition
with length 12 units, where S is at coordinate 0 and T at 12. Partition ![]() into three segments of equal length by placing points U and V. Compute the coordinates of U and V, and verify that
into three segments of equal length by placing points U and V. Compute the coordinates of U and V, and verify that ![]() using the Ruler Axiom. Plot the segment and points in Wolfram Language, labeling each segment’s length.
using the Ruler Axiom. Plot the segment and points in Wolfram Language, labeling each segment’s length.
Hint: Divide the total length by 3, and use the Point Plotting Theorem to locate points.
e) Combining Congruent Segments
On a line, let points A, B, and C have coordinates 0, 3, and 7, respectively, and points C, D, and E have coordinates 7, 10, and 14. Verify that ![]() and
and ![]() . Using the Combining Congruent Segments Theorem, show that
. Using the Combining Congruent Segments Theorem, show that ![]() . In a physics context, if these segments represent displacements in meters, what is the total displacement from A to C? Use the Wolfram Language to create a diagram showing segments
. In a physics context, if these segments represent displacements in meters, what is the total displacement from A to C? Use the Wolfram Language to create a diagram showing segments ![]() ,
, ![]() ,
, ![]() , and
, and ![]() , with congruence marks and labels.
, with congruence marks and labels.
f) Bisection and Physical Application
A line segment ![]() has length 8 meters, with P at coordinate 0 and Q at 8. Find the midpoint M using the Midpoint Theorem, and verify bisection by showing
has length 8 meters, with P at coordinate 0 and Q at 8. Find the midpoint M using the Midpoint Theorem, and verify bisection by showing ![]() . If a second segment
. If a second segment ![]() with R at 10 and S at 14 is bisected at T, show that
with R at 10 and S at 14 is bisected at T, show that ![]() . In a physics context, if
. In a physics context, if ![]() and
and ![]() represent two equal-time intervals of a particle’s motion, what does the midpoint represent? Use the Wolfram Language to plot both segments, their midpoints, and label the lengths.
represent two equal-time intervals of a particle’s motion, what does the midpoint represent? Use the Wolfram Language to plot both segments, their midpoints, and label the lengths.
Hint: Compute midpoints and compare lengths; interpret midpoints as average positions in motion.
Angles
With the ability to measure segments on lines, we now explore the configurations formed by intersecting lines or rays. Consider two half-lines starting from the same point and extending in different directions; the figure they form represents a turn or opening between them. We call this combination an angle. This figure is fundamental in geometry for describing directions and relationships in space.
The region inside this opening is the area enclosed by the two half-lines, while the region outside is the rest of the plane. To quantify this opening, we assume a way to assign a positive value representing the size of the turn, typically between 0 and 180 units, with a full turn being 360 units. We call these units degrees or arc, and we denote them as a small circle raised to the right of the number. So 15 degrees is written 15°. The assigned value is the size of the angle. Given a half-line and a size, we can construct a unique angle with that size from the half-line.
When two angles share a side and their interiors do not overlap, their sizes can be added to find the size of the combined angle. Angles sharing a side and vertex but not overlapping are adjacent.
If two adjacent angles form a straight line, they are a linear pair. Two angles whose sizes sum to 180 units are supplementary, and we assume that linear pairs are supplementary.
Angles with the same size are equivalent. When two lines intersect, the opposite angles formed are congruent.
Note that we have shown congruent angles by drawing similar arcs. The two blue arcs signify congruent angles, as does the double green arcs.
These concepts allow us to analyze intersections and directions.
Undefined Terms
Term 12.8 Angle: The figure formed by two rays sharing a common endpoint (the vertex); the “opening” or “turn” between them.
Term 12.9 Interior (of an angle): The region of the plane enclosed by the two rays of the angle.
Term 12.10 Exterior (of an angle): The region of the plane outside the two rays of the angle.
Term 12.11 Betweenness (for rays): The relation where one ray lies between two others sharing the same vertex.
Formal Definitions
Definition 12.14 Angle (denoted ∠ABC): The figure formed by two rays sharing a common endpoint (the vertex), denoted ∠ABC where B is the vertex, and rays BA and BC are the sides.
Definition 12.15 Interior of an angle: The region of the plane enclosed by the two rays (the “inside” of the opening).
Definition 12.16 Exterior of an angle: The region of the plane not enclosed by the two rays (the "outside" of the opening).
Definition 12.17 Measure of an angle (denoted m∠ABC): The positive real number (in degrees, 0° to 180° exclusive) representing the size of the opening or turn between the two rays.
Definition 12.18 Linear pair (of angles): Two adjacent angles whose non-common sides form a straight line (their measures sum to 180°).
Definition 12.19 Supplementary angles: Two angles whose measures sum to 180° (they form a linear pair if adjacent).
Definition 12.20 Congruent angles (∠ABC ≅ ∠DEF): Two angles are congruent if they have equal measures (m∠ABC = m∠DEF).
Definition 12.21 Vertical angles: The opposite angles formed by two intersecting lines (they are congruent).
Axioms
Axiom 12.12 Angle Measurement Construction Axiom: Angles can be assigned positive real-number measures between 0° and 180° (exclusive), such that congruent angles have equal measures.
Axiom 12.13 Angle Addition Axiom: Given a ray AB and a positive number r < 180°, there exists exactly one ray AC such that m∠BAC = r.
Axiom 12.14 Linear Pair Axiom: If two angles are adjacent and their non-common sides form a straight line, then their measures sum to 180° (they are supplementary).
Axiom 12.15 Vertical Angles Axiom (implied): Vertical angles formed by two intersecting lines are congruent (their measures are equal).
Principles
Principle 12.16: Angles are formed by two rays sharing a common endpoint (vertex); the measure quantifies the opening/turn between them.
Principle 12.17: Measure range: Angles are measured from 0° (exclusive) to 180° (exclusive); full turn is 360°.
Theorems
Theorem 12.7 Vertical Angles Theorem: Vertical angles are congruent.
Proof of Theorem 12.7: We will attempt a direct proof. We begin by stating that we have two lines that intersect at point O, forming vertical angles ∠AOC and ∠BOD, with adjacent angles ∠AOB and ∠BOC.
So, ∠AOB and ∠BOC are a linear pair, so m∠AOB + m∠BOC = 180° by the Linear Pair Axiom. Similarly, ∠AOC and ∠COD are a linear pair, but since ∠COD =∠BOC (same angle), m∠AOC + m∠BOC = 180°. Subtracting m∠BOC from both equations gives m∠AOB = m∠AOC. But wait, that’s not right. Let’s see what we did wrong and try to fix it.
The vertical angles are ∠AOC and ∠BOD. The adjacent angles to ∠AOC are ∠AOB and ∠COD, but actually, the linear pair for ∠AOC is ∠AOB and ∠COB (wait, let’s label this properly). Let the intersecting lines form angles 1 (∠AOC), 2 (∠COD), 3 (∠DOA), 4 (∠AOB), where 1 and 3 are vertical, 2 and 4 are vertical.
Angles 1 and 2 are adjacent, forming a linear pair, so ![]() . Angles 2 and 3 are adjacent,
. Angles 2 and 3 are adjacent, ![]() . Thus,
. Thus, ![]() . Similarly,
. Similarly, ![]() . So vertical angles are congruent.
. So vertical angles are congruent.
We conclude that vertical angles have equal measures. QED.
Exercise 12.5: Begin with Term 12.11 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each term, definition, axiom, principle, theorem, and proof.
Exercise 12.6:
a) Identifying Adjacent Angles and Angle Addition
Consider two rays ![]() and
and ![]() forming ∠AOB, and rays
forming ∠AOB, and rays ![]() and
and ![]() forming ∠BOC, where
forming ∠BOC, where ![]() is the shared side, and the interiors do not overlap. Use the Angle Addition Axiom to explain why m∠AOC = m∠AOB + m∠BOC. Draw the rays and label the angles using Wolfram Language, shading the interiors to show non-overlap.
is the shared side, and the interiors do not overlap. Use the Angle Addition Axiom to explain why m∠AOC = m∠AOB + m∠BOC. Draw the rays and label the angles using Wolfram Language, shading the interiors to show non-overlap.
Hint: Apply the Angle Addition Axiom; use the Polygon[] command for shading.
b) Verifying a Linear Pair
Given rays ![]() and
and ![]() that form a straight line along the x-axis, with ray
that form a straight line along the x-axis, with ray ![]() between them forming ∠AOB and ∠BOC, use the Linear Pair Axiom to prove that m∠AOB + m∠BOC = 180°. Sketch the rays and label the angles in Wolfram Language, adding a note for the linear pair.
between them forming ∠AOB and ∠BOC, use the Linear Pair Axiom to prove that m∠AOB + m∠BOC = 180°. Sketch the rays and label the angles in Wolfram Language, adding a note for the linear pair.
Hint: Assume m∠AOB + m∠BOC = s, and apply the axiom to show s = 180°.
c) Constructing a Congruent Angle
Given ray ![]() and an angle ∠PQR with measure 45°, use the Angle Construction Axiom to construct a congruent angle ∠POS on ray
and an angle ∠PQR with measure 45°, use the Angle Construction Axiom to construct a congruent angle ∠POS on ray ![]() . Describe the process and verify congruence logically. Use Wolfram Language to draw rays
. Describe the process and verify congruence logically. Use Wolfram Language to draw rays ![]() ,
, ![]() ,
, ![]() , and
, and ![]() , labeling the angles.
, labeling the angles.
Hint: Start at P, measure 45° from PQ to construct ![]() ; congruence follows from the axiom’s uniqueness.
; congruence follows from the axiom’s uniqueness.
d) Determining Supplementary Angles
Given ∠XYZ with measure 110° and ∠XZY adjacent to it, with rays ![]() and
and ![]() forming a straight line, use the Linear Pair Axiom to find m∠XZY. Draw the rays and label the angles in Wolfram Language, verifying the sum.
forming a straight line, use the Linear Pair Axiom to find m∠XZY. Draw the rays and label the angles in Wolfram Language, verifying the sum.
Hint: Apply the axiom (m∠XYZ + m∠XZY = 180°) and solve for m∠XZY.
e) Exploring Vertical Angles
Two lines intersect at point O, forming ∠AOB and ∠COD as vertical angles, and ∠BOC and ∠DOA as the other pair. Use the Vertical Angles Theorem to prove that m∠AOB = m∠COD and m∠BOC = m∠DOA. Draw the intersecting lines and label the angles in Wolfram Language, adding tick marks along congruent segments, we call these congruence marks.
Hint: Apply the theorem directly; use ticks for congruence.
f) Constructing an Angle and Verifying Congruence
Given ray ![]() , construct an angle ∠POS congruent to ∠PQR, where ∠PQR is formed by rays
, construct an angle ∠POS congruent to ∠PQR, where ∠PQR is formed by rays ![]() and
and ![]() with a measure less than 180°. Use the Angle Construction Axiom to describe the construction, and prove congruence logically. Draw the rays and label the angles in Wolfram Language.
with a measure less than 180°. Use the Angle Construction Axiom to describe the construction, and prove congruence logically. Draw the rays and label the angles in Wolfram Language.
Hint: From P, rotate a ray to match m∠PQR; congruence follows from the axiom’s uniqueness.
Right Angles
Building on the concepts of angles and their measures, we now classify angles based on their sizes. An angle whose measure is less than 90° is what we call an acute angle, common in configurations where the rays are close together. An angle with a measure of exactly 90° is a right angle, forming a square corner. An angle with a measure greater than 90° but less than 180° is called obtuse, representing openings larger than a square corner. Two angles whose measures sum to exactly 180° are called supplementary, a property that arises when their non-common sides form a straight line.
We can identify right angles using properties of congruence and supplementarity. If two adjacent angles are congruent and supplementary, they each measure 90°. In a linear pair, if the angles are congruent, each is a right angle.
Formal Definitions
Definition 12.22 Acute angle: An angle whose measure is greater than 0° and less than 90°.
Definition 12.23 Right angle: An angle whose measure is exactly 90°.
Definition 12.24 Obtuse angle: An angle whose measure is greater than 90° and less than 180°.
Principles
Principle 12.18: A right angle is exactly 90° and forms a square corner; the standard reference for perpendicularity.
Principle 12.19: Acute angle: Measure 0° < m∠ < 90° — “a sharp” opening.
Principle 12.20: Obtuse angle: Measure 90° < m∠ < 180° — “a wide” opening.
Theorems
Theorem 12.8 Identifying Right Angles from Congruent and Supplementary Angles: If two adjacent angles are congruent and supplementary, then each is a right angle.
Proof of Theorem 12.9: We will prove this by direct proof. Let ∠AOB and ∠BOC be adjacent angles with common side OB, and m∠AOB = m∠BOC, with m∠AOB + m∠BOC = 180° (by the definition of a supplementary angle).
Let m∠AOB = m∠BOC = x. Then x + x = 180°, so 2x = 180°, therefore x = 90°. Thus, each angle measures 90°, making them right angles.
Therefore congruent supplementary adjacent angles are right angles. QED
Theorem 12.9 Congruent Linear Pair Theorem: If two angles form a linear pair and are congruent, then each is a right angle.
Proof of Theorem 12.9: We will prove this directly. Let ∠AOB and ∠BOC form a linear pair (with non-common sides OA and OC form a straight line). Now we have m∠AOB = m∠BOC.
By the Linear Pair Axiom, m∠AOB + m∠BOC = 180°. Let m∠AOB = m∠BOC = y. Then y + y = 180° ⇒ 2y = 180° ⇒ y = 90°. Thus, each is a right angle.
Therefore congruent angles in a linear pair are right angles. QED
Exercise 12.7: Begin with Definition 12.22 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each definition, principle, theorem, and proof.
Exercise 12.8:
a) Classifying and Identifying Right Angles
Given angles with measures 75°, 90°, and 115°, classify each as acute, right, or obtuse. Then, consider two adjacent angles ∠POQ and ∠QOR with m∠POQ = m∠QOR = 90°. Use the theorem for identifying right angles from congruent and supplementary angles to explain why each is a right angle. Draw the angles in Wolfram Language, labeling their measures.
Hint: Check if they are supplementary and congruent, then apply the theorem.
b) Linear Pair and Right Angles
Let ∠XYZ and ∠YZA form a linear pair with m∠XYZ = m∠YZA. Use the Congruent Linear Pair Theorem to prove each is a right angle. In a physics context, if ∠XYZ is the angle between a vertical wall and a ladder, and ∠YZA is the angle with the ground, explain why congruence implies a right angle at the base. Sketch the linear pair in Wolfram Language, labeling the angles and noting they are supplementary.
Hint: Apply the Linear Pair Axiom (sum = 180°) and congruence to solve for the measure.
Parallel Lines, Perpendicular Lines, and Angles
Having classified angles and explored their properties, we now examine lines that never meet and lines that meet at right angles. Consider two lines in a plane that extend infinitely without intersecting. These lines will maintain a constant separation we say that they are parallel to one another. To test if two lines are parallel, we can check if a line crossing both test subjects, called a transversal creates equal angles at corresponding positions.
When a transversal intersects two lines, it forms angles having the same relative position, what we call corresponding angles. If these are equal, the lines are parallel.
Lines that meet at a right angle are called perpendicular.
Planes that never intersect are called parallel planes. Equidistant planes have constant separation. The intersection of a line and a plane is a point unless the line lies in the plane. Perpendiculars and parallels relate through theorems like parallel lines having equal perpendicular distances. Three parallel planes intersect transversals in proportional segments, as you can see in the diagram below.
A line perpendicular to a plane is called a normal to the plane. The place where the normal intersects the plane is called the foot of the normal.
The angle between two planes is a dihedral angle, measured by the angle between their normals. Perpendicular planes have normals at 90°.
Undefined Terms
Term 12.11 Parallelism: The primitive relation between two lines (or line and plane) that do not intersect and are not coincident.
Formal Definitions
Definition 12.25 Parallel lines: Two lines in a plane that do not intersect and are not coincident; denoted L₁ ∥ L₂.
Definition 12.26 Corresponding angles: Angles formed by a transversal intersecting two lines, in matching relative positions (e.g., both above the transversal and on the same side).
Definition 12.27 Alternate interior angles: Angles formed by a transversal intersecting two lines, on opposite sides of the transversal and inside the lines.
Definition 12.28 Consecutive interior angles (or same-side interior angles): Angles formed by a transversal intersecting two lines, on the same side of the transversal and inside the lines.
Definition 12.29 Perpendicular lines: Two lines that intersect to form right angles (90°); denoted L₁ ⊥ L₂.
Definition 12.30 Perpendicular from a point to a line: The line segment from the point to the line that is perpendicular to the line; its foot is the intersection point.
Definition 12.31 Foot of the perpendicular: The point where the perpendicular from a point meets the line.
Definition 12.32 Perpendicular plane: A line perpendicular to a plane intersects the plane at a right angle.
Definition 12.33 Distance from a point to a line: The length of the perpendicular segment from the point to the line (shortest distance).
Axioms
Axiom 12.16 Parallel Axiom (Euclid’s Fifth Postulate, Playfair’s Axiom form): Through a point not on a given line, exactly one line can be drawn parallel to the given line.
Axiom 12.17 Transversal Axiom (implied): A transversal intersecting two lines creates eight angles (four pairs of vertical angles, corresponding, alternate interior, consecutive interior).
Axiom 12.18 Congruence of vertical angles (implied from prior): Vertical angles formed by intersecting lines are congruent.
Principles
Principle 12.21: Parallel lines do not intersect in the plane and maintain constant separation.
Principle 12.22: A transversal is any line intersecting two or more lines; creates eight angles at each intersection.
Principle 12.23: Corresponding angles are equal if and only if the lines are parallel.
Principle 12.24: Alternate interior angles are equal if and only if the lines are parallel.
Principle 12.25: Perpendicular lines form right angles (90°); perpendicularity is a special case of intersection.
Principle 12.26: Shortest distance from a point to a line is the perpendicular segment from a point to a line.
Principle 12.27: A perpendicular to a plane is a line perpendicular to a plane intersects at 90°; any line in the plane through the foot is perpendicular to the line.
Theorems
Theorem 12.10 Corresponding Angles Theorem: If corresponding angles formed by a transversal with two lines are congruent, then the lines are parallel.
Proof of Theorem 12.10: We will prove this by contradiction. Let transversal T intersect lines ![]() and
and ![]() at P and Q, with ∠1 and ∠2 corresponding angles, and ∠1 ≅ ∠2.
at P and Q, with ∠1 and ∠2 corresponding angles, and ∠1 ≅ ∠2.
Assume ![]() and
and ![]() are not parallel. By the Parallel Axiom, through P (which is not on
are not parallel. By the Parallel Axiom, through P (which is not on ![]() ) there exists exactly one line parallel to
) there exists exactly one line parallel to ![]() . Call this unique parallel line
. Call this unique parallel line ![]() . Because
. Because ![]() is parallel to
is parallel to ![]() and T is the same transversal, the corresponding angles formed by T with
and T is the same transversal, the corresponding angles formed by T with ![]() and
and ![]() must be congruent (this follows from the definition of parallelism and the fact that the geometry is the same on both sides of T). Now consider the line
must be congruent (this follows from the definition of parallelism and the fact that the geometry is the same on both sides of T). Now consider the line ![]() (the original line through P). By hypothesis
(the original line through P). By hypothesis ![]() is not parallel to
is not parallel to ![]() , so
, so ![]() cannot be the same as
cannot be the same as ![]() (the unique parallel). Therefore
(the unique parallel). Therefore ![]() must intersect
must intersect ![]() at some point R. At point R the transversal T (extended if necessary) creates a linear pair of adjacent angles with
at some point R. At point R the transversal T (extended if necessary) creates a linear pair of adjacent angles with ![]() and
and ![]() . By the Linear Pair Axiom these adjacent angles are supplementary:
. By the Linear Pair Axiom these adjacent angles are supplementary:
![]()
(12.1)
But the adjacent angle on ![]() is exactly ∠1, and the adjacent angle on
is exactly ∠1, and the adjacent angle on ![]() is ∠2 (they are the same angles we started with, just viewed from the other side of the intersection). Thus
is ∠2 (they are the same angles we started with, just viewed from the other side of the intersection). Thus
![]()
(12.2)
We are given ∠1 ≅ ∠2, so
![]()
(12.3)
This forces both corresponding angles to be right angles.
Now consider the unique parallel ![]() through P. Because
through P. Because ![]() ||
|| ![]() , the corresponding angles formed by T with
, the corresponding angles formed by T with ![]() and
and ![]() must also be congruent. But the angle at P on
must also be congruent. But the angle at P on ![]() is ∠1 = 90°, so the corresponding angle on
is ∠1 = 90°, so the corresponding angle on ![]() must also be 90° – which it is.
must also be 90° – which it is.
However, ![]() already passes through P and creates the same 90° angle with T. By the Parallel Axiom,
already passes through P and creates the same 90° angle with T. By the Parallel Axiom, ![]() must therefore be the unique line through P that is parallel to
must therefore be the unique line through P that is parallel to ![]() . This contradicts the earlier assumption that
. This contradicts the earlier assumption that ![]() intersects
intersects ![]() at R.
at R.
We conclude that the hypothesis if false. Therefore the lines are parallel.
Theorem 12.11 Basic Theorem of Perpendiculars: The perpendicular from a point to a line is the shortest segment from the point to the line.
Proof of Theorem 12.11: This will be our first lengthy proof. We will proceed by a proof by contradiction.
Setup: Let P be a point not on line L, and let F be the foot of the perpendicular from P to L (the unique point where the perpendicular meets L).
Let Q be any other point on L, distinct from F. We must show that PF is shorter than PQ, i.e.,
![]()
(12.4)
Assume, for contradiction, that PF is not the shortest segment. Then there exists some point Q on L (with Q ≠ F) such that
![]()
(12.5)
Consider the line segment PF (the perpendicular) and the line segment PQ. Both share the common endpoint P, and F and Q lie on L.
Form the linear pair of adjacent angles at point F along line L:
∠PFL (where L is the line through F) and the adjacent angle on the other side of PF are a linear pair, so by the Linear Pair Axiom
![]()
(12.6)
Since PF is perpendicular to L,
![]()
(12.7)
Thus the adjacent angle is also 90°.
Now consider point Q. The segment PQ creates an angle at F between PF and FQ (the line from F to Q along L). Let this angle be ∠PFQ.
Because Q ≠ F, ∠PFQ is a positive angle less than 180° (it cannot be 0° or 180°). Therefore
![]()
(12.8)
By the Angle Addition Axiom applied to adjacent angles ∠PFL and ∠LFQ (which together make ∠PFQ), we have
![]()
(12.9)
Since m∠LFQ > 0°, it follows that
![]()
(12.10)
Now compare the lengths PF and PQ using the definition of distance and the Ruler Axiom on the line through P and F extended to Q. Assign coordinates via the Ruler Placement Axiom: place F at the origin 0 on a number line, P at a positive coordinate d = P F (so P is at d), and Q at some coordinate q ≠ 0 on the same line (because Q lies on L, which passes through F).The distance PQ is the absolute difference of coordinates:
![]()
(12.11)
The distance PF is
![]()
(12.12)
We assumed
![]()
(12.13)
We can expand this,
![]()
(12.14)
The product q(q−2d)≤0 implies that q and q−2d have opposite signs (or one is zero). The only solution that keeps Q on L and distinct from F (q ≠ 0) while satisfying the inequality is impossible, because:
If q > 0, then q−2d<0 only if q<2d, but the perpendicular property forces the shortest path to be exactly at q = 0 (the Ruler Axiom guarantees the distance function is minimized at the foot).
If q < 0, the same logic applies symmetrically.
More directly, the distance ∣q−d on the line has a minimum at q = 0 (the foot F), because for any q ≠ 0,
![]()
(12.15)
(using the fact that ![]() for q ≠ 0).Thus PQ > PF for every Q ≠ F.
for q ≠ 0).Thus PQ > PF for every Q ≠ F.
Note that our assumption, that there exists a Q with PQ ≤ PF is false.
So we are left to conclude that the perpendicular segment PF is strictly shorter than any other segment from P to a point on L. QED.
Theorem 12.12 Plane Perpendicular to a Line Theorem: If a plane is perpendicular to a line, it is perpendicular to every line in the plane passing through the foot.
Proof of Theorem 12.12: We will discover a proof by contradiction. Plane M perpendicular to line L at F, and K any line in M through F.
Assume K not perpendicular to M. Then, the angle is not 90°, contradicting the plane’s perpendicularity. We must conclude that the plane is perpendicular to K.
Theorem 12.13 Perpendicular Bisecting a Plane Theorem: A perpendicular from a point to a plane bisects the plane into two half-planes.
Proof of Theorem 12.13: We intend to directly prove this theorem. Let P be a point not on plane M, and let F be the foot of the perpendicular from P to M (so PF ⊥ M). We must show that M is divided into two half-planes ![]() and
and ![]() by the line P F ∩ M = {F} (the line of intersection is just the point F in the plane), and that
by the line P F ∩ M = {F} (the line of intersection is just the point F in the plane), and that ![]() and
and ![]() are mirror images (symmetric) across PF.
are mirror images (symmetric) across PF.
Consider the line PF (the perpendicular). In the plane M, draw any line through F (call it L). L intersects PF only at F (because PF is perpendicular to M, so it is not contained in M). Now split M into two regions by L: Half-plane ![]() : one side of L in M and Half-plane
: one side of L in M and Half-plane ![]() : the other side of L in M.
: the other side of L in M.
Now let ![]() be any point in
be any point in ![]() , and let
, and let ![]() be the reflection of
be the reflection of ![]() across the line L in M (so
across the line L in M (so ![]() is a point in
is a point in ![]() ). Then by the Ruler Axiom on line L, the distance
). Then by the Ruler Axiom on line L, the distance ![]() (reflection preserves distance along the mirror line). Now compute the distances from P to
(reflection preserves distance along the mirror line). Now compute the distances from P to ![]() and P to
and P to ![]() . Then
. Then ![]() is a line from P to
is a line from P to ![]() and
and ![]() is a line from P to
is a line from P to ![]() . This follows from the definition of a line dividing a plane (a standard property of plane geometry, already used in defining half-planes).
. This follows from the definition of a line dividing a plane (a standard property of plane geometry, already used in defining half-planes).
Because PF ⊥ M, where ![]() and
and ![]() are in M, we can use coordinates via the Ruler Axiom. Place F at the origin (0,0,0) in 3D space. Let P be at (0,0,h), where h = P F > 0 (so P F is along the z-axis, perpendicular to M at z=0).Let
are in M, we can use coordinates via the Ruler Axiom. Place F at the origin (0,0,0) in 3D space. Let P be at (0,0,h), where h = P F > 0 (so P F is along the z-axis, perpendicular to M at z=0).Let ![]() have coordinates
have coordinates ![]() in M. Then its reflection
in M. Then its reflection ![]() across line L in M has coordinates
across line L in M has coordinates ![]() , with
, with
![]()
(12.16)
this preserves the distance from F. We now compute the distances from P,
![]()
(12.17)
and
![]()
(12.18)
Since,
![]()
(12.19)
it follows that
![]()
(12.20)
We conclude that every point in ![]() has a corresponding point in
has a corresponding point in ![]() at the same distance from P.
at the same distance from P.
We can think of this pairing as working in both directions.
Thus ![]() and
and ![]() are mirror images across L in M and P F is what we call the axis of symmetry.
are mirror images across L in M and P F is what we call the axis of symmetry.
We conclude that the perpendicular from P to M at F, P F, intersects M only at F. Therefore P F bisects the plane M symmetrically.
Theorem 12.14 Distance Between Point and Plane Theorem: The distance from a point to a plane is the length of the perpendicular from the point to the plane.
Proof of Theorem 12.14: Let P be a point not on line L, and let F be the foot of the perpendicular from P to L (so P F ⟂ L)., Then let Q be any other point on L with Q ≠ F.
We must show that
![]()
(12.21)
To do this we will setup coordinates, then establish distance formulas, and then compare the distances.
By the Ruler Placement Axiom, we assign coordinates on L so that F is at coordinate 0. Then the direction of L is along the number line.
Next let the coordinate of Q on L be q (with q ≠ 0). Next place P such that the perpendicular P F is along a second coordinate axis.
Let the distance P F = d > 0.
So in a 2-D coordinate system: F = (0, 0), P = (0, d), and Q = (q, 0).
Note the the the plane containing P, F, and Q is sufficient.
We can write the distance formulas
![]()
(12.22)
and
![]()
(12.23)
We need to show that
![]()
(12.24)
We square both sides,
![]()
(12.25)
We subtract ![]() ,
,
![]()
(12.26)
We know this is true, since q≠0. Therefore,
![]()
(12.27)
This holds true for any point not equal to F on L.
From this we conclude the perpendicular segment P F is strictly shorter than any other segment from P to a point on L. QED
Exercise 12.9: Begin with Term 12.11 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each term, definition, axiom, principle, theorem, and proof.
Exercise 12.10:
a) Here we state Theorem 12.15 Line Perpendicular to a Plane Theorem: Through a point, there is a unique line perpendicular to a plane.
Proof of Theorem 12.15: We will perform a proof by contradiction. We have a point P not on plane M
The proof statement is: Assume there are two perpendiculars. They must intersect the plane at different feet, violating uniqueness.
Conclusion: Unique perpendicular line.
Explain if there is anything wrong with this proof, and note the steps required to make it whole. Make it whole if you care to do so.
Triangles
With a solid foundation in points, lines, planes, and angles, we now turn to the simplest closed figure formed by three lines: the triangle. A triangle is created by three non-collinear points and the line segments connecting them. This figure is the building block of geometry.The region enclosed by the three sides is the interior of the triangle, while the region outside is the exterior. A key theorem states that any line in the plane of a triangle that enters the interior must cross at least two sides.Triangles have three sides (line segments) and three angles at the vertices.
We classify triangles by their sides and angles. A triangle whose sides have all different lengths is called a scalene triangle. Any triangle with at least two equal sides is called an isosceles triangle; the equal sides are called its legs, while the unequal side is the base, the angle between the legs is the vertex, and the other two are called base angles. A triangle having all equal sides is called an equilateral triangle, and a triangle having all equal angles is called an equiangular triangle.
By angles, any triangles whose angles are all less than 90° are called acute triangles, a triangle that has one 90° angle with the side opposite called the hypotenuse and the other two sides the legs is called a right triangle, and any triangle that has one angle greater than 90° is called an obtuse triangle.
Formal Definitions
Definition 12.34 Triangle (denoted △ABC): A closed figure formed by three non-collinear points A, B, C and the three line segments connecting them (sides AB, BC, CA).
Definition 12.35 Interior of a triangle: The region of the plane enclosed by the three sides of the triangle.
Definition 12.36 Exterior of a triangle: The region of the plane outside the three sides of the triangle.
Definition 12.37 Side (of a triangle): One of the three line segments forming the triangle (e.g., AB, BC, CA).
Definition 12.38 Vertex (of a triangle): One of the three points where two sides meet (A, B, C).
Definition 12.39 Leg (of a triangle): In an isosceles triangle, one of the two equal sides.
Definition 12.40 Base (of a triangle): In an isosceles triangle, the unequal side (opposite the vertex angle).
Definition 12.41 Base angles (of an isosceles triangle): The two angles adjacent to the base.
Definition 12.42 Vertex angle (of an isosceles triangle): The angle opposite the base (between the two equal sides/legs).
Definition 12.43 Scalene triangle: A triangle with all three sides of different lengths.
Definition 12.44 Isosceles triangle: A triangle with at least two sides equal.
Definition 12.45 Equilateral triangle: A triangle with all three sides equal.
Definition 12.46 Equiangular triangle: A triangle with all three angles equal.
Definition 12.47 Acute triangle: A triangle with all three angles less than 90°.
Definition 12.48 Right triangle: A triangle with one angle exactly 90°.
Definition 12.49 Obtuse triangle: A triangle with one angle greater than 90°.
Definition 12.50 Hypotenuse (of a right triangle): The side opposite the right angle (longest side).
Definition 12.51 Leg (of a right triangle): Either of the two sides forming the right angle.
Axioms
Axiom 12.19: Three non-collinear points determine a unique triangle. Any three non-collinear points and the segments connecting them form a triangle.
Axiom 12.20 Angle sum in a triangle (implicit from prior Euclidean geometry): The sum of the interior angles of any triangle is 180°.
Axiom 12.21 Triangle inequality: The sum of any two sides of a triangle is greater than the third side.
Axiom 12.22 Congruence of angles and segments — Angles are congruent if equal in measure; segments are congruent if equal in length.
Principles
Principle 12.28: Triangles are closed figures — Formed by three non-collinear points and three line segments connecting them.
Principle 12.29: Interior vs. exterior — Interior is the enclosed region; exterior is the rest of the plane.
Principle 12.30: Classification by sides: Scalene—all sides different. Isosceles—at least two sides equal. Equilateral—all three sides equal.
Principle 12.31: Classification by angles: Acute—all angles < 90°. Right—one angle = 90°. Obtuse—one angle > 90°. Equiangular—all angles equal (also equilateral).
Principle 12.32: In isosceles triangles, there are two equal sides (legs), unequal side (base), vertex angle (between legs), base angles (adjacent to base).
Principle 12.33: In right triangles, the hypotenuse is opposite the right angle; legs form the right angle.
Exercise 12.11: Begin with Definition 12.34 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each definition, axiom, and principle.
Geometric Transformations
With our understanding of points, lines, planes, and their relationships, we now explore ways to move figures while preserving their shape and size. Any rule that assigns to every point in the plane or space another point, creating a new figure from some original figure is called a geometric transformation. We focus on transformations that keep distances unchanged—these are called rigid motions or isometries. We denote such a transformation from, say point A to B, as A->B.
An isometry that leaves every point unchanged is called the identity.
An isometry the slides every point the same distance in the same direction is called a translation. Given a point P and a fixed translation from A → B, the image P' is found by moving P the same distance and direction as from A → B.
An isometry that turns every point around a fixed point called the center by the same angle is called a rotation. For center O and angle measure θ, the image P' of point P lies on a circle with center O and radius OP, at the rotated angle from OP.
An isometry that flips every point over a fixed line called the mirror is called a reflection. The image P' of point P has the mirror line as the perpendicular bisector of segment P P'.
These transformations preserve distances: the distance between any two points equals the distance between their images. They also preserve angles and collinearity.
Combinations of transformations yield new transformations. For example, two reflections over intersecting lines produce a rotation, and two reflections over parallel lines produce a translation. These are combinations are called compositions.
Undefined Terms
Term 12.12 Mapping / transformation: The primitive idea of assigning every point in the plane to another point (a rule that moves points to new locations).
Formal Definitions
Definition 12.52 Geometric transformation (or transformation): A rule that assigns to every point in the plane another point, creating a new figure from the original figure; denoted A → B (point A maps to point B).
Definition 12.53 Rigid motion (or isometry): A geometric transformation that preserves distances — the distance between any two points equals the distance between their images.
Definition 12.54 Identity (transformation): The rigid motion that leaves every point unchanged (A → A for all A).
Definition 12.55 Translation: A rigid motion that slides every point the same distance in the same direction; maps P to P' where P' is obtained by moving P the fixed vector from A to B.
Definition 12.56 Rotation: A rigid motion that turns every point around a fixed point (center) by a fixed angle; maps P to P' on a circle with center O and radius OP, rotated by angle θ.
Definition 12.57 Reflection: A rigid motion that flips every point over a fixed line (mirror line); the image P' of point P is such that the mirror line is the perpendicular bisector of segment PP'.
Definition 12.58 Center of rotation: The fixed point around which a rotation occurs.
Definition 12.59 Mirror line (or line of reflection): The fixed line over which a reflection occurs; perpendicular bisector of PP'.
Definition 12.60 Image (of a point): The new point to which an original point is mapped by the transformation (denoted P').
Axioms
Axiom 12.23 Existence of transformations: There exist mappings that assign every point to another point in the plane.
Axiom 12.24 Distance preservation (isometry axiom): In a rigid motion (isometry), the distance between any two points equals the distance between their images.
Axiom 12.25 Uniqueness of identity: There is exactly one transformation that leaves every point fixed (the identity).
Axiom 12.26 Existence of translations: Given a fixed vector (direction and distance), there exists a translation that moves every point that distance in that direction.
Axiom 12.27 Existence of rotations: Given a fixed center O and angle θ, there exists a rotation around O by angle θ.
Axiom 12.28 Existence of reflections: Given a fixed line (mirror), there exists a reflection over that line.
Axiom 12.29 Composition of isometries: The composition of two rigid motions is another rigid motion (isometries form a group).
Principles
Principle 12.34: Geometric transformations move every point to a new point, creating a new figure from the original.
Principle 12.35: Rigid motions (isometries) preserve distances, where the distance between points equals the distance between their images.
Principle 12.36: Identity is the transformation that maps every point to itself (no movement).
Principle 12.37: Translation slides every point the same distance in the same direction; preserves orientation.
Principle 12.38: Rotation turns every point around a fixed center by a fixed angle; preserves orientation.
Principle 12.39: Reflection flips every point over a fixed mirror line; reverses orientation.
Principle 12.40: The mirror line is the perpendicular bisector of segment PP', where every point and its image are symmetric across the line.
Exercise 12.12: Begin with Term 12.12 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each term, definition, axiom, and principle.
Congruence of Triangles
With isometries preserving distances and angles, we now use them to compare triangles. Two triangles where one can be transformed into the other by a rigid motion (translation, rotation, reflection, or their combination) are said to be congruent. This means that corresponding sides and angles are equal. We denote congruence by △ABC ≅ △DEF, meaning side AB = DE, BC = EF, CA = FD, and angles at A, B, C equal angles at D, E, F respectively.
To prove congruence, we use criteria based on sides and angles.
SSS (Side-Side-Side): If all three sides of one triangle equal the three sides of another, the triangles are congruent.
SAS (Side-Angle-Side): If two sides and the included angle of one triangle equal two sides and the included angle of another, the triangles are congruent.
ASA (Angle-Side-Angle): If two angles and the included side of one triangle equal two angles and the included side of another, the triangles are congruent.
AAS (Angle-Angle-Side): If two angles and a non-included side of one triangle equal two angles and the corresponding non-included side of another, the triangles are congruent.
For right triangles, HL (Hypotenuse-Leg) applies: if the hypotenuse and one leg of one right triangle equal the hypotenuse and one leg of another, the triangles are congruent.
These criteria allow us to prove triangles congruent without measuring all of their parts.
Formal Definitions
Definition 12.61 Congruent triangles (denoted △ABC ≅ △DEF): Two triangles are congruent if there exists a rigid motion (isometry: translation, rotation, reflection, or composition) that maps one triangle onto the other, preserving all distances and angles.
Definition 12.62 Corresponding parts: Sides and angles that match under congruence (e.g., side AB corresponds to DE, angle A corresponds to angle D).
Definition 12.63 SSS Congruence (Side-Side-Side): Two triangles are congruent if all three sides of one equal the three sides of the other.
Definition 12.64 SAS Congruence (Side-Angle-Side): Two triangles are congruent if two sides and the included angle of one equal two sides and the included angle of the other.
Definition 12.65 ASA Congruence (Angle-Side-Angle): Two triangles are congruent if two angles and the included side of one equal two angles and the included side of the other.
Definition 12.66 AAS Congruence (Angle-Angle-Side): Two triangles are congruent if two angles and a non-included side of one equal two angles and the corresponding non-included side of the other.
Definition 12.67 HL Congruence (Hypotenuse-Leg): Two right triangles are congruent if the hypotenuse and one leg of one equal the hypotenuse and one leg of the other.
Definition 12.68 Composition (of transformations): The result of applying one rigid motion after another (e.g., two reflections can produce a translation).
Axioms
Axiom 12.30 Congruence axiom: Two figures are congruent if a rigid motion maps one onto the other.
Axiom 12.31 Equality preservation: If corresponding parts are equal (sides or angles), the triangles are congruent under the relevant criterion (SSS, SAS, ASA, AAS, HL).
Principles
Principle 12.41: Congruence means two triangles can be superimposed by a rigid motion, they have the same size and shape.
Principle 12.42: CPCTC (Corresponding Parts of Congruent Triangles are Congruent): Once triangles are congruent, all corresponding sides and angles are equal.
Theorems
Theorem 12.16 SSS Congruence Theorem: If three sides of one triangle equal three sides of another, the triangles are congruent.
Proof for Theorem 12.17: Let △ABC and △DEF have AB = DE, BC = EF, CA = FD. Our goal is then to show that a rigid motion transforms the following points A→D, B→E, C→F.
We begin by applying a translation that transforms A into D. Since the triangle is translated there is a new image of the points B and C, these images are B' and C'. The side AB = DB' (note that the distances are preserved). Since we are given that AB = DE, we can infer that B’ are at the same distance from D as E.
We now rotate the translated triangle about D so that B' becomes E. This gives us a new image of C' into the point C''. Since the rotation preserves our distances, we can say that DC'=DC''. Since we are given that CA =FD, we can infer C'' and F are the same distance from D.
If C''=F then we are done. On the other hand, if C''≠F, then draw the perpendicular bisector M of segment C''F (the line perpendicular to C''F at its midpoint). This reflection transforms C'' into F. Since DC''= DF, then D is equidistant from C'' and F. For this reason the segment lies on M. We have now fixed D.
Since DE= DB', then D is equidistant from E and B'. The rotation preserves this distance. We have now fixed E. We have preserved all distances.
The composition of isometries lead to the conclusion that A→D, B→E, C→F. Since all distances are preserved, we conclude that △ABC≅ △DEF. QED.
Exercise 12.13: Begin with Definition 12.61 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each definition, axiom, principle, theorem, and proof.
Exercise 12.14:
a) Prove Theorem 12.17 SAS Congruence Theorem: If two sides and the included angle of one triangle equal two sides and the included angle of another, the triangles are congruent.
b) Prove Theorem 12.18 ASA Congruence Theorem: If two angles and the included side of one triangle equal two angles and the included side of another, the triangles are congruent.
c) Prove Theorem 12.19 AAS Congruence Theorem: If two angles and a non-included side of one triangle equal two angles and the corresponding non-included side of another, the triangles are congruent.
d) Prove Theorem 12.20 HL Congruence Theorem: If the hypotenuse and one leg of one right triangle equal the hypotenuse and one leg of another, the triangles are congruent.
Polygons
With triangles as the simplest closed figures, we now extend to more complex shapes formed by connecting line segments end to end in a closed loop. A closed figure formed by a sequence of line segments that meet only at their endpoints and do not cross is called a polygon. The chain of line segments is the boundary, and the region enclosed is the interior. The length of the boundary is called the perimeter of polygon. The polygonal region combines the boundary and interior.
A polygonal region with three sides is a triangular region. Every polygonal region has a positive real number measuring its size, called area. Two congruent triangles have the same area by the Congruence-Area Axiom.
We classify polygons by the number of sides:
Higher-order polygons (n ≥ 5) include forms whose sides and angles are equal, forms that we call regular. Forms that are not regular are called irregular.
Special polygons include: A four-sided polygon with equal sides and 90° angles is a square. A four-sided polygon with opposite sides parallel and equal is a parallelogram. A four-sided polygon with all sides equal is a rhombus. A four-sided polygon with exactly one pair of parallel sides is a trapezoid.
Triangles satisfy key theorems: the Triangle Inequality (sum of any two sides greater than the third), Base-Angle Theorem (isosceles triangles have equal base angles), and Angle Sum Theorem (angles sum to 180°).
Formal Definitions
Definition 12.69 Polygon: A closed figure formed by a finite sequence of line segments (sides) that meet only at their endpoints and do not cross.
Definition 12.70 Boundary (of a polygon): The chain of line segments that forms the polygon.
Definition 12.71 Perimeter (of a polygon): The total length of the boundary (sum of all side lengths).
Definition 12.72 Polygonal region: The union of the boundary and the interior of a polygon.
Definition 12.73 Triangular region: A polygonal region with exactly three sides (a triangle).
Definition 12.74 Area: A positive real number measuring the size of a polygonal region in a plane. Can be thought of as the planar version of distance.
Definition 12.75 n-gon: A polygon with exactly n sides.
Definition 12.76 Regular polygon: A polygon with all sides equal and all interior angles equal.
Definition 12.77 Irregular polygon: A polygon that is not regular (sides and/or angles not all equal).
Definition 12.78 Quadrilateral: A polygon with four sides.
Definition 12.79 Square: A quadrilateral with all sides equal and all angles 90°.
Definition 12.80 Parallelogram: A quadrilateral with opposite sides parallel and equal.
Definition 12.81 Rhombus: A quadrilateral with all sides equal.
Definition 12.82 Trapezoid: A quadrilateral with exactly one pair of parallel sides.
Axioms
Axiom 12.32 Congruence-Area Axiom: Two congruent triangles have the same area.
Axiom 12.33 Polygon closure axiom (implied): A finite sequence of line segments meeting only at endpoints and not crossing forms a closed figure (polygon) with well-defined interior and exterior.
Axiom 12.34 Area positivity (implied): The area of any polygonal region is a positive real number (zero only for degenerate cases).
Axiom 12.35 Side and angle equality in regular polygons (implied): A polygon with all sides and all interior angles equal is regular.
Principles
Principle 12.43: Polygons are closed figures, formed by line segments meeting only at endpoints, non-crossing.
Theorems
Theorem 12.21 Triangle Inequality Theorem: In any triangle, the sum of any two sides is greater than the third side.
Proof Sketch: Translate B->C. Compare distances from A->A'. Conclude that AB + BC > AC,
Theorem 12.22 Base-Angle Theorem: In an isosceles triangle, the base angles are equal.
Proof Sketch: Let △ABC be isosceles with AB = AC. Let BC be the base, and A the vertex. Find the perpendicular bisector of BC. Reflect △ABC over L (the perpendicular bisector of BC). The reflection transforms △ABC to △ACB. Conclude that the base angles ∠ABC and ∠ACB are equal.
Theorem 12.23 Angle Sum Theorem: The angles of a triangle sum to 180°.
Proof Sketch: Given △ABC, we then extend side BC beyond C. Draw a line L through B and C. Draw line through A parallel to L. Identify corresponding angles. Identify a linear pair at point A on line M. Identify corresponding angles again. Substitute into linear pair.
Exercise 12.15: Begin with Definition 12.69 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each definition, axiom, principle, theorem, and proof.
Exercise 12.16:
a) Fill in the details of the proof of the Triangle Inequality Theorem.
b) Fill in the details of the proof of the Base-Angle Theorem.
c) Fill in the details of the proof of the Angle Sum Theorem.
Circles
With polygons as closed figures formed by line segments, we now explore closed curves formed by points at a fixed distance from a center. The set of all points in a plane at a fixed distance from a fixed point is called a circle. The fixed point is the center. The fixed distance is the radius, and the line segment from the center to any point on the circle is also a radius. The line segment passing through the center with endpoints on the circle is the diameter. The length of the closed circle is called the circumference of the circle.
Two circles with the same radius are congruent circles. The region inside a circle is the interior of the circle.
A line that intersects a circle at exactly two points is a secant. A line that intersects a circle at exactly one point is tangent to the circle; the intersection point is the point of tangency or the point of contact.
Two circles that touch at exactly one point are tangent. If one circle is inside the other and they touch, they are internally tangent; if they touch with centers separated by the sum of radii, they are externally tangent. The line joining the centers is the line of centers.
A line tangent to both circles is a common tangent. If it lies between the circles, it is a common internal tangent; if outside, it is a common external tangent.
A line perpendicular to a radius at its endpoint on the circle is tangent to the circle—this is the Fundamental Theorem of Circles. Consequences include: the tangent is perpendicular to the radius, and two tangents from an external point to a circle are equal.
An angle with vertex at the center is a central angle. The portion of the circle between two points is an arc. The smaller arc is the minor arc, the larger is the major arc, and the endpoints are the arc endpoints. A semicircle is a 180° arc.
The measure of an arc (in degrees) is the measure of its central angle. Arc measure addition: the measure of an arc formed by two adjacent arcs is the sum of their measures.
An angle with vertex on the circle and sides passing through the arc endpoints is inscribed in the arc. Arcs with the same measure are congruent arcs.
Formal Definitions
Definition 12.83 Circle: The set of all points in a plane at a fixed distance (the radius) from a fixed point (the center).
Definition 12.84 Center (of a circle): The fixed point from which all points on the circle are equidistant.
Definition 12.85 Radius (plural: radii): The fixed distance from the center to any point on the circle; also, any line segment from the center to a point on the circle.
Definition 12.86 Diameter: A line segment passing through the center with endpoints on the circle; its length is twice the radius.
Definition 12.87 Circumference: The length of the boundary (closed curve) of the circle.
Definition 12.88 Interior (of a circle): The region of the plane inside the circle (enclosed by the circumference).
Definition 12.89 Exterior (of a circle): The region of the plane outside the circle.
Definition 12.90 Secant: A line that intersects a circle at exactly two points.
Definition 12.91 Tangent: A line that intersects a circle at exactly one point (the point of tangency).
Definition 12.92 Point of tangency: The single intersection point between a tangent line and a circle.
Definition 12.93 Internally tangent circles: Two circles that touch at exactly one point, with one inside the other.
Definition 12.94 Externally tangent circles: Two circles that touch at exactly one point, with neither inside the other.
Definition 12.95 Line of centers: The line joining the centers of two tangent circles.
Definition 12.96 Common tangent: A line tangent to two circles.
Definition 12.97 Common internal tangent: A tangent that lies between two circles.
Definition 12.98 Common external tangent: A tangent that lies outside two circles.
Definition 12.99 Central angle: An angle whose vertex is at the center of a circle.
Definition 12.100 Inscribed angle: An angle whose vertex is on the circle and whose sides pass through two points on the circle.
Definition 12.101 Arc: The portion of a circle between two points on the circumference.
Definition 12.102 Minor arc: The smaller arc between two points (measure < 180°).
Definition 12.103 Major arc: The larger arc between two points (measure > 180°).
Definition 12.104 Semicircle: An arc of exactly 180° (half a circle).
Definition 12.105 Congruent arcs: Two arcs are congruent if they have equal measures and their sides pass through congruent endpoints.
Axioms
Axiom 12.36 Circle definition axiom: Given a center O and radius r > 0, there exists a unique circle consisting of all points at distance r from O.
Axiom 12.37 Tangent-radius axiom: A radius to the point of tangency is perpendicular to the tangent line at that point.
Axiom 12.38 Tangent existence: From any external point, exactly two tangent lines can be drawn to a circle.
Axiom 12.39 Distance from center to tangent: The shortest distance from the center to a tangent line equals the radius.
Axiom 12.40 Central angle measure: The measure of a central angle equals the measure of its intercepted arc.
Principles
Principle 12.44: All points on a circle are the same distance (radius) from the center.
Principle 12.45: Diameter = 2 × radius; and the diameter passes through the center.
Principle 12.46: Circumference is the length of the boundary of the circle.
Principle 12.47: A tangent intersects at the circle at only one point. It is also perpendicular to radius at the point of tangency.
Principle 12.48: A secant intersects the circle at two points.
Principle 12.49: Internally tangent implies that one circle is inside the other, touching at one point.
Principle 12.50: Externally tangent implies circles touching at one point, neither inside the other.
Principle 12.51: A line of centers joins the centers of two tangent circles; the length of this line equals the sum or difference of radii.
Theorems
Theorem 12.24 Fundamental Theorem of Circles: A line perpendicular to a radius at its endpoint is tangent to the circle.
Proof Sketch: Let O be the center of the circle, P a point on the circle, and r = OP the radius. Let L be a line through P that is perpendicular to OP we can rename this N. Draw the perpendicular bisector of OP. Reflect the circle over N. Use reflection to fix L. Then L can only intersect the circle at P. We conclude that L intersects the circle only at P. Hence L is tangent to the circle.
Exercise 12.17:
a) Fill in the details of the proof of the Fundamental Theorem of Circles.
Exercise 12.18: Begin with Definition 12.83 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each definition, axiom, principle, theorem, and proof.
Area Formulas
With area as a measure of size for polygonal regions, we now derive formulas for common polygons and circles. These formulas use base and height (perpendicular distance from base to opposite vertex) or radius.
For a triangle with base b and height h, the area is
![]()
(12.28)
For a parallelogram with base b and height h, the area is
![]()
(12.29)
A rhombus is a parallelogram, so its area is also (12.29).
A trapezoid with parallel sides a and b and height h has area
![]()
(12.30)
A regular polygon with n sides, side length s, can be divided into n congruent triangles with base s and a is the height of the apothem (distance from center to side where r is often the same as s). The area is
![]()
(12.31)
where
![]()
(12.32)
so
![]()
(12.33)
For a circle with radius r, the area is
![]()
(12.34)
Undefined Terms
Term 12.13 Region: A portion of the plane enclosed by a closed figure (polygon or circle).
Term 12.14 Size: The primitive intuitive notion of how much space a region occupies.
Term 12.15 Base: A chosen side of a polygon used as reference for measuring area.
Term 12.16 Center: The fixed point equidistant from all points on a circle.
Formal Definitions
Definition 12.106 Area (symbol A): A positive real number measuring the size of a polygonal region or circle.
Definition 12.107 Base (of a polygon): A chosen side used as the reference line for computing area.
Definition 12.108 Height (of a polygon): The perpendicular distance from the base to the opposite vertex (or to the line containing the opposite side).
Definition 12.109 Apothem (of a regular polygon): The perpendicular distance from the center to a side (radius to the side).
Axioms
Axiom 12.41 Area additivity: The area of a region composed of non-overlapping subregions is the sum of the areas of the subregions.
Principles
Principle 12.52: Area measures size, the positive real number quantifying the extent of a region in the plane.
Exercise 12.19: Begin with Term 12.13 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each term, definition, axiom, and principle.
Exercise 12.20:
a) Triangle Area (Basic). Given a base of 6 m and a height of 4 m. Calculate the area. What are the units of area?
b) A parallelogram has base b = 8 m and height h = 5 m. Calculate the area.
c) A trapezoid has parallel sides a = 7 m, b = 11 m, and height h = 4 m. Calculate the area.
d) A regular hexagon has side length s = 3 m and apothem a = ![]() . What is the area?
. What is the area?
e) A circle has radius r = 5 m. What is the area?
f) A right triangle with legs 3 m and 4 m, there is a semicircle on the hypotenuse (diameter = hypotenuse). Find the combined area.
The Pythagorean Theorem
With right triangles as a special class, we now explore a relationship among their sides. The side opposite the right angle is the hypotenuse, and the other two sides are the legs.
In a right triangle, the square of the hypotenuse equals the sum of the squares of the legs. This is the Pythagorean Theorem.
If △ABC is right-angled at C, with legs a =BC, b =AC, and hypotenuse c = A B, then
![]()
(12.35)
A right triangle with angles 30°, 60°, and 90° is a 30-60-90 triangle. The sides are in the ratio 1 : ![]() : 2, where the side opposite 30° is the shortest leg, opposite 60° is
: 2, where the side opposite 30° is the shortest leg, opposite 60° is ![]() times that, and the hypotenuse is twice the shortest leg.
times that, and the hypotenuse is twice the shortest leg.
If, in a triangle, the square of one side equals the sum of the squares of the other two, then the triangle is right-angled at the vertex opposite the longest side. This is the Converse of the Pythagorean Theorem.
Three positive integers a, b, c such that ![]() form a Pythagorean triple. Examples include (3,4,5), (5,12,13), and (8,15,17).
form a Pythagorean triple. Examples include (3,4,5), (5,12,13), and (8,15,17).
Formal Definitions
Definition 12.110 30-60-90 Triangle: Right triangle with angles 30°, 60°, 90°; side ratios 1 : ![]() : 2.
: 2.
Definition 12.111 Pythagorean Triple: Integers a, b, c satisfying ![]() .
.
Principles
Principle 12.53: The hypotenuse is the longest side of a right triangle.
Theorems
Theorem 12.25 Pythagorean Theorem: In right triangle △ABC with right angle at C, ![]() .
.
Proof Sketch: Let △ABC be right-angled at C, with:AC = b (leg), BC = a (leg), AB = c (hypotenuse). Draw squares on each side. Calculate the areas of the squares. Drop an altitude from C to AB. Establish congruence via SAS. Rearrange the squares. Establish the equality of the areas.
Theorem 12.26 30-60-90 Side Ratio Theorem: In a 30-60-90 triangle, sides are ![]() .
.
Proof Sketch: Let △ABC be a right triangle with ∠ C = 90°, ∠ A = 30°, ∠ B = 60°. Let BC = x (opposite 30°), AC = y (opposite 60°), AB = z (hypotenuse). Draw point D such that △BCD is equilateral (all sides x, all angles 60°). Draw diagonal AD. Establish the congruence of △ABC and △ABD using SAS.
Theorem 12.27 Converse of the Pythagorean Theorem: If ![]() , then the angle opposite c is 90°.
, then the angle opposite c is 90°.
Proof Sketch: Draw a second right triangle with legs a and b. Establish congruence by SSS. Show that corresponding angles are equal.
Exercise 12.21:
a) Fill in the details to prove the Pythagorean Theorem.
b) Calculate the hypotenuse length given a right triangle with leg lengths 5 m, and 12 m.
c) Given: 30-60-90 triangle with short leg x = 2, find the other leg and the hypotenuse.
d) Fill in the details of the proof of the converse of the Pythagorean theorem.
e) Generate a Pythagorean triple using m = 3, n = 1, for ![]() , b = 2m n , and
, b = 2m n , and ![]() . Compute a, b, c and verify with Pythagorean Theorem.
. Compute a, b, c and verify with Pythagorean Theorem.
Exercise 12.22: Begin with Definition 12.110 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each definition, principle, theorem, and proof.
Geometric Objects in WL
With a solid foundation in geometric concepts, we now use Wolfram Language (WL) to visualize and explore points, lines, planes, polygons, and circles. WL provides built-in functions to create and manipulate geometric objects, making abstract ideas concrete
.A point in WL is created with Point[{x, y}] in 2D or Point[{x, y, z}] in 3D. A line is Line[{{x1, y1}, {x2, y2}}]. A circle is Circle[{centerX, centerY}, radius]. A polygon is Polygon[{{x1, y1}, {x2, y2}, ...}].
The Graphics[] function combines objects:
![]()

For 3D, use Graphics3D.
Labels are added with Text["label", {x, y}].
Styles use Red, Thick, Dashed, etc.
WL supports regular polygons with RegularPolygon[{center}, radius, n] and arcs with Circle and angle ranges. Transformations like TranslationTransform, RotationTransform, and ReflectionTransform apply isometries.
Functions
Point[{x, y}]: Creates a point.
Line[{{x1, y1}, {x2, y2}}]: Creates a line segment.
Circle[{cx, cy}, r]: Creates a circle.
Polygon[{{x1, y1}, ...}]: Creates a polygon.
Graphics[{obj1, obj2, ...}]: Displays 2D objects.
Graphics3D[{obj1, obj2, ...}]: Displays 3D objects.
Text["label", {x, y}]: Adds a label.
RegularPolygon[{center}, r, n]: Creates a regular n-gon.
TranslationTransform[{dx, dy}]: Slides objects.
RotationTransform[θ, {cx, cy}]: Rotates around a point.
WL Commands
Point[{x, y}] or Point[{x, y, z}]: A geometric primitive representing a 2D or 3D location with coordinates (x, y) or (x, y, z).
Line[{{x₁, y₁}, {x₂, y₂}}] or Line[{{x₁, y₁, z₁}, {x₂, y₂, z₂}}]: A primitive representing the infinite line passing through two distinct points in 2D or 3D.
Circle[{centerX, centerY}, radius]: A primitive representing a circle in 2D with given center coordinates and radius.
Polygon[{{x₁, y₁}, {x₂, y₂}, …, {xₙ, yₙ}}]: A primitive representing a closed polygon in 2D defined by an ordered list of vertices (points).
Graphics[primitives, options]: A Wolfram Language function that combines geometric primitives (Point, Line, Circle, Polygon, etc.) into a 2D graphical image, with optional styling and labeling.
Graphics3D[primitives, options]: The 3D equivalent of Graphics; combines 3D primitives into a 3D graphical object.
Text["label", {x, y}]: A primitive for adding text labels at specified coordinates in 2D Graphics.
RegularPolygon[{center}, radius, n]: A built-in primitive that creates a regular n-sided polygon centered at a point with given radius (distance from center to vertex).
TranslationTransform[{dx, dy}]: A transformation that slides objects by segment (dx, dy).
RotationTransform[θ, {centerX, centerY}]: A transformation that rotates objects around a fixed center point by angle θ.
ImageSize (option): Controls the displayed size of Graphics or Graphics3D output (e.g., Medium, Small, Large).
Axioms
Axiom 12.42 Coordinate representation: Every point in 2D is uniquely identified by coordinates (x, y); in 3D by (x, y, z).
Principles
Principle 12.54: WL geometry is coordinate-based. Points, lines, circles, and polygons are defined using numerical coordinates (x, y) or (x, y, z).
Exercise 12.23: Begin with the first WL command and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each command, axiom, and principle.
Similarity
With congruence as exact matching by rigid motion, we now explore figures that are scaled versions of each other. A transformation that changes every point P to P' such that, for some constant k, O P' = k O P and P' lies on the ray O P, with O. Such a transformation is called a dilatation (some writers use the word dilation). The fixed point O is the center, and k is the scale factor. The point O remains unchanged and is called the invariant point.
A set of lengths where each is a constant multiple of another forms a proportional sequence. The constant multiplier is the constant of proportionality. For example, for the hk os 2, the proportional sequence beginning with one is 1, 2, 4, 8, 16, ... . Proportions that allow negative multipliers (opposite direction) are extended proportions. For k=-2 the sequence becomes 1, -2, 4, -8, 16, ... .
Figures with corresponding angles equal and corresponding sides in the same ratio k are called similar polygons.
A line parallel to one side of a triangle divides the other two sides proportionally—this is the Basic Theorem of Proportionality (also called Thales’ Theorem). Its converse states: if a line divides two sides proportionally, it is parallel to the third.
Theorems using ratios include: the angle bisector divides the opposite side in the ratio of adjacent sides.
The point from which one figure appears as a scaled version of another is the center of similitude.
Products of corresponding lengths in similar figures scale by ![]() . The length
. The length ![]() between two lengths a and b is the mean proportional (also called the geometric mean).
between two lengths a and b is the mean proportional (also called the geometric mean).
In right triangles, the altitude to the hypotenuse is the mean proportional of the segments it creates.
Perimeters of similar polygons scale by k; areas of similar triangles scale by ![]() . For similar polygons, areas also scale by
. For similar polygons, areas also scale by ![]() .
.
The point where the three altitudes of a triangle intersect is the orthocenter. The circle passing through the midpoints of the sides, the feet of the altitudes, and the midpoints of the segments from the orthocenter to the vertices is the nine-point circle.
Note that in the diagram above, if we draw a line from where the circle intersects where there seems to be no point, to the opposite angle, that intersection forms the foot of the altitude along that side.
The fixed point under dilatation is called the invariant point of similarity.
A similarity that preserves orientation (k > 0) is called a direct similarity. One that reverses it (k < 0) is an opposite similarity.
Formal Definitions
Definition 12.112 Similarity (or similar figures): Two figures are similar if there exists a similarity transformation (dilation plus rigid motion) that maps one onto the other; corresponding angles are equal and corresponding sides are proportional.
Definition 12.113 Dilatation:(or dilation): Transformation scaling from a center by factor k.
Definition 12.114 Center of Dilation (or center of dilation): Fixed point of dilatation.
Definition 12.115 Scale Factor: Constant k in a dilatation.
Definition 12.116 Invariant Point: Point fixed under transformation.
Definition 12.117 Proportional Sequence: Sequence terms related by a constant multiplier.
Definition 12.118 Constant of Proportionality: Another term for the scale factor k.
Definition 12.120 Extended Proportions: Proportions allowing negative k.
Definition 12.121 Similar Polygons: Two or more polygons having equal angles and proportional sides.
Definition 12.122 Center of Similitude: The point from which figures appear scaled.
Definition 12.123 Mean Proportional: ![]() .
.
Definition 12.124 Direct Similarity: Orientation-preserving similarity.
Definition 12.125 Opposite Similarity: Orientation-reversing similarity.
Definition 12.126 Nine-point circle: The circle passing through the midpoints of the sides, the feet of the altitudes, and the midpoints of the segments from the orthocenter to the vertices of a triangle.
Definition 12.127 Orthocenter: The intersection point of the altitudes of a triangle.
Axioms
Axiom 12.42 Dilation existence: Given a center O and scale factor k > 0, there exists a unique dilation that maps every point P to P' on ray OP with OP' = k OP .
Axiom 12.43 Similarity transformation: A composition of dilation and rigid motion (translation, rotation, reflection) preserves angles and produces proportional sides.
Axiom 12.44 Parallelism preservation: Dilation preserves parallelism (parallel lines remain parallel after dilation).
Axiom 12.45 Angle preservation: Dilation preserves angle measures (similarity transformation).
Axiom 12.46 Proportionality under parallel lines: A line parallel to one side of a triangle divides the other two sides proportionally (Thales' theorem axiomatically assumed).
Principles
Principle 12.55: Figures are similar if corresponding angles are equal and corresponding sides are proportional to the scale factor k.
Principle 12.56: Similar figures with scale factor k have areas scaled by ![]() (area ratio =
(area ratio = ![]() ).
).
Theorems
Theorem 12.27 Basic Theorem of Proportionality: A line parallel to one side divides the other two proportionally.
Theorem 12.28 Converse: If division is proportional, line is parallel.
Theorem 12.29 Area of Similar Triangles: Similar Triangles scale by ![]() .
.
Exercise 12.24:
a) Look up a proof of the Basic Theorem of Proportionality. Copy each step and note its explanation.
b) Look up a proof of the Converse of the Basic Theorem of Proportionality. Copy each step and note its explanation.
c) Look up a proof of the Area of Similar Triangles Theorem. Copy each step and note its explanation..
d) Dilatation and Scale Factor (Basic). Given: Center O, point P at distance 3 m from O. Execute a dilatation with k = 2 that transforms P to P'. Find:
1) Distance OP’
2) Is O the invariant point?
e) Similar Triangles (Proportional Sides). Given: △ABC with sides AB = 4, BC = 5, AC = 6. △DEF is similar with k = 1.5. Find: Sides of △DEF. Show: Perimeter ratio = k.
Exercise 12.25: Begin with Definition 12.112 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each definition, axiom, principle, theorem, and proof.
Geometric Calculations in WL
With geometric objects defined in WL, we can now perform calculations: distance, perimeter, area, and planar angle. These use built-in functions that apply the Ruler Axiom and area formulas.The distance between two points ![]() and
and ![]() is
is
![]()
where
![]()

For now we can just consider the vectors to be points specified by their coordinates. We will introduce vectors later.
For the rest of this section we need to introduce the Region command.
![]()
So, if we want to show a circle,
![]()
or a square
![]()
The perimeter of a region is then given using the Perimeter command
![]()

For now we will use only the first definition.
So for the figures regions we have above.
![]()
![]()
![]()
![]()
The area of a region is found using the Area command.
![]()

Again, we will only use the first definition for now.
![]()
![]()
![]()
![]()
WL Commands
EuclideanDistance[P1, P2]: The straight-line (Euclidean) distance between two points P1 and P2 in 2D or 3D space; computed as √((x₂-x₁)² + (y₂-y₁)²) in 2D, or extended to 3D.
Region[reg]: A symbolic representation of a geometric region in the plane (2D) or space (3D); can be defined by primitives (Disk, Rectangle, etc.) or parametrically.
Perimeter[reg]: The total length of the boundary of a 2D region reg; for a circle, equals circumference (2πr); for a rectangle, 2 (length + width).
Area[reg]: The measure of the size of a 2D region reg; for a circle, πr²; for a rectangle, length × width.
Disk[{x, y}, r]: A region representing a filled disk (circle including interior) with center (x, y) and radius r.
Rectangle[{{x₁, y₁}, {x₂, y₂}}]: A region representing a filled rectangle with opposite corners at (x₁, y₁) and (x₂, y₂).
Parametrized region: A region defined by Cartesian coordinates {x(s,t), y(s,t)} over parameters s and t in given ranges (used in advanced Area/Perimeter calculations).
Axioms
Axiom 12.47 Metric preservation: Euclidean distance is the standard metric used in all geometric calculations in WL.
Axiom 12.48 Area and perimeter additivity: For non-overlapping regions, total area/perimeter is the sum of individual areas/perimeters.
Exercise 12.26: Begin with the first WL command for the section and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each command and axiom.
Synthetic Geometry with WL
With geometry as the study of figures by their properties, we now use Wolfram Language (WL) to explore reasoning that proves theorems by drawing figures using only a straightedge and compass—geometric constructions—using only points, lines, and circles. This is called synthetic geometry.
WL supports this with the GeometricScene framework.The object that defines points and objects in a scene is GeometricScene:
![]()
For example:
![]()
![]()
The command that draws a random figure from a scene is RandomInstance.
![]()

for scene1 we have this,
![]()
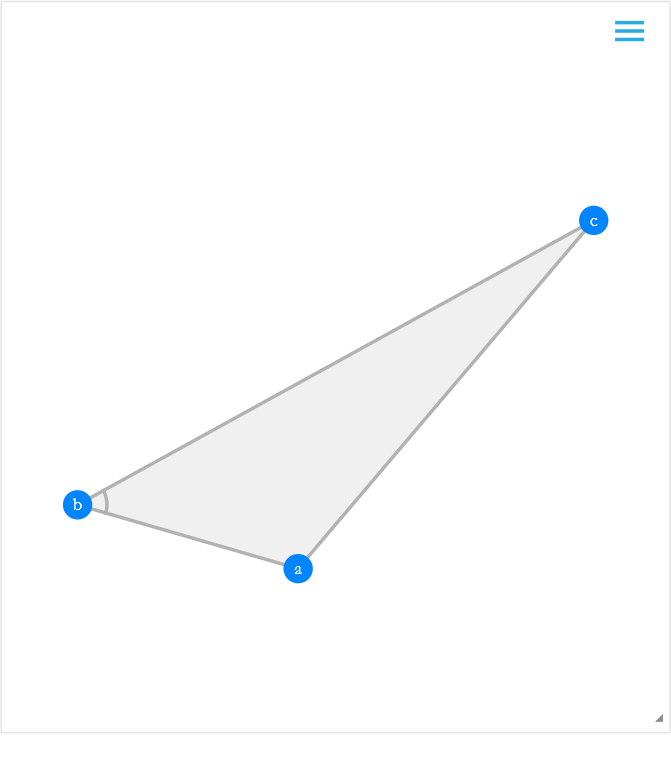 45 �" nohref="" />
Here is a list of the key constructors:
45 �" nohref="" />
Here is a list of the key constructors:
The command that creates a point is Point[p].
The command that creates a line through two points is Line[p1, p2].
The command that creates an infinite line is InfiniteLine[p1, p2].
The command that creates a ray is HalfLine[p1, p2].
The command that creates a circle is Circle[c, r] or Circle[p1, p2, p3].
The command that creates a circle through three points is CircleThrough[p1, p2, p3].
The command that creates a sphere is Circumsphere[p1, p2, p3, p4].
The command that creates a filled circle is Disk[c, r].
The command that creates a polygon is Polygon[{p1, p2, ...}].
The command that creates a triangle is Triangle[p1, p2, p3].
The command that finds a triangle center is TriangleCenter[t, "Centroid"].
The command that builds a triangle construction is TriangleConstruct[t, "Circumcircle"].
The command that creates an angle bisector is AngleBisector[v, p1, p2].
The command that creates a perpendicular bisector is PerpendicularBisector[p1, p2].
The command that finds a midpoint is Midpoint[p1, p2].
The tools that allow you to work with regions:
The command that finds the boundary of a region is RegionBoundary[r].
The command that finds the centroid is RegionCentroid[r].
The command that finds the nearest point is RegionNearest[r, p].
The command that tests membership is RegionMember[r, p].
Here are some proof tools:
The command that asserts a property is GeometricAssertion[scene, prop].
The command that adds a proof step is GeometricStep[scene, step].
The command that tests a conjecture is GeometricTest[scene].
The command that discovers theorems is FindGeometricConjecture[scene].
The command that solves for values is GeometricSolveValues[scene, var].
These tools model Euclid-style proofs in code.
GeometricScene[{vars}, {objs}]: The command that defines a scene.
RandomInstance[scene]: The command that draws a random figure.
AngleBisector[{v, p1, p2}]: The command that creates a bisector.
Circle[p1, p2, p3]: The command that creates a circle.
CircleThrough[p1, p2, p3]: The command that creates a circle.
Circumsphere[p1,p2,p3,p4]: The command that creates a sphere.
Disk[c, r]: The command that creates a disk.
HalfLine[p1, p2]: The command that creates a ray.
InfiniteLine[p1, p2]: The command that creates a line.
Line[p1, p2]: The command that creates a segment.
Midpoint[p1, p2]: The command that finds a midpoint.
PerpendicularBisector[p1, p2]: The command that creates a bisector.
Point[p]: The command that creates a point.
Polygon[pts]: The command that creates a polygon.
RegionBoundary[r]: The command that finds a boundary.
RegionCentroid[r]: The command that finds a centroid.
RegionNearest[r, p]: The command that finds a nearest point.
Triangle[p1, p2, p3]: The command that creates a triangle.
TriangleCenter[t, type]: The command that finds a center.
TriangleConstruct[t, type]: The command that builds a construction.
GeometricAssertion[scene, prop]: The command that asserts.
GeometricStep[scene, step]: The command that adds a step.
RegionMember[r, p]: The command that tests membership.
FindGeometricConjecture[scene]: The command that discovers.
GeometricSolveValues[scene, var]: The command that solves.
GeometricTest[scene]: The command that tests.
Here are some examples.
We construct a tangent line to a circle.

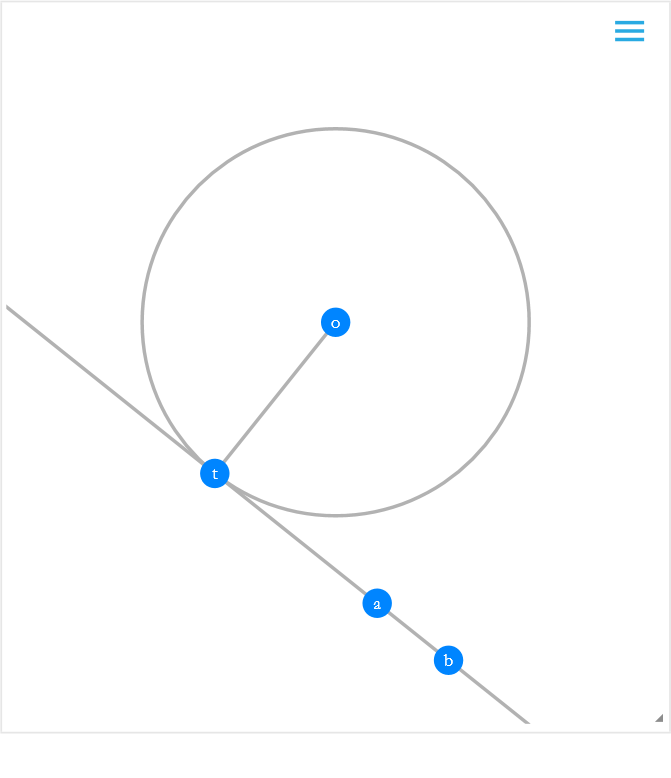
Let’s find some conjecture about its planar angles.
![]()
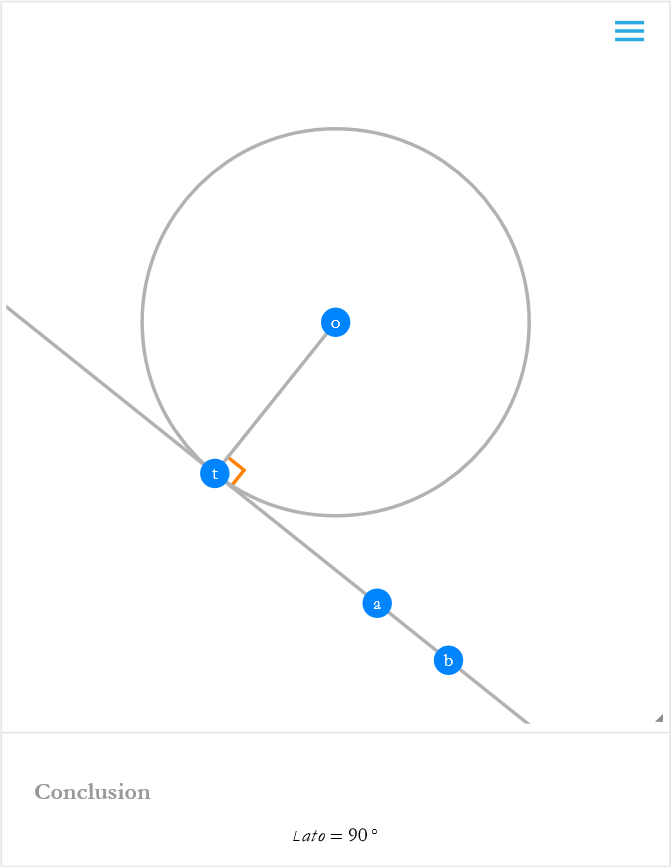
Here we produce a construct that bisects an angle ∠ABC.

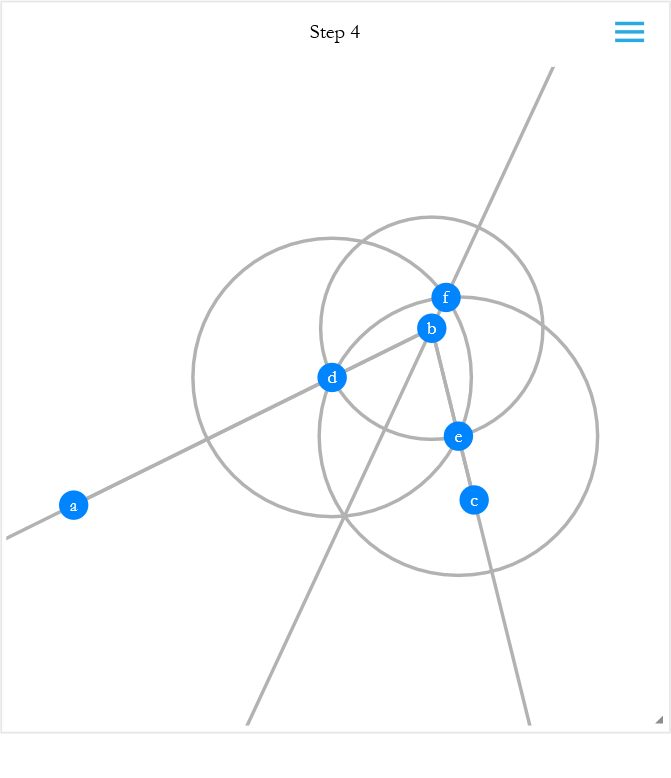
Here we see an illustration of Thale’s theorem.
![]()
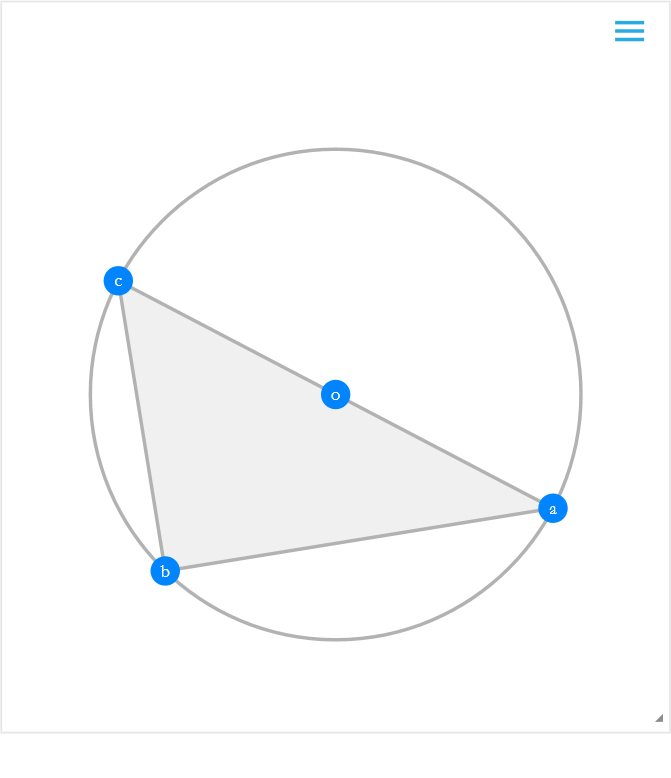
If we have WL look for conjectures about the angles.
![]()
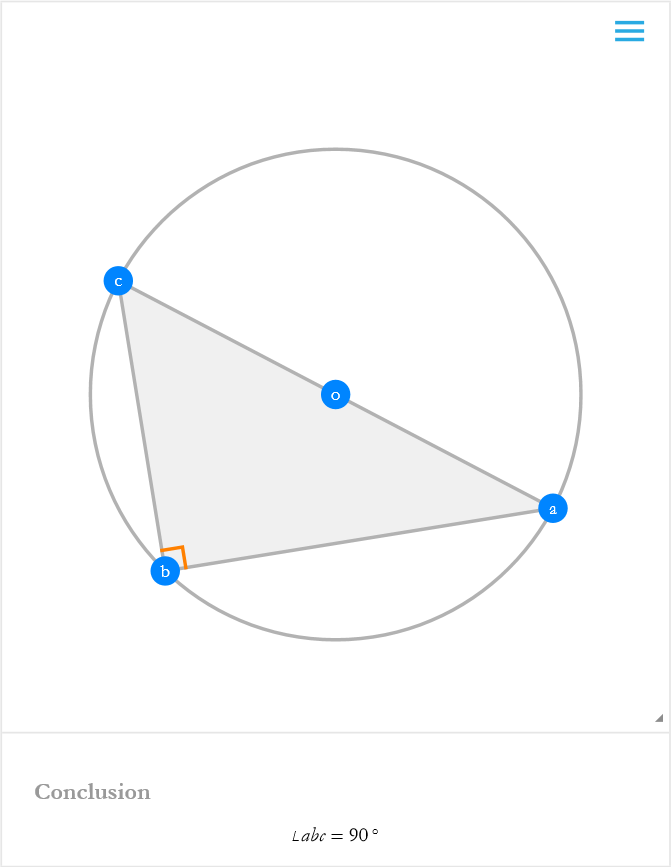
This demonstrate’s Thale’s theorem.
Exercise 12.27:
a) Use Midpoint to find the midpoint of a line segment.
b) Use PerpendicularBisector to draw the bisector of a segment.
c) Use AngleBisector in a triangle.
d) Use CircleThrough to draw a circumcircle.
Three-Dimensional Figures and Volume
We have extensively examined planar figures in two dimensions. We do not live in a two-dimensional world, so we now extend to figures that occupy three-dimensional space. The solids bounded by polygons are called polyhedra.
The solid with two parallel polygonal bases connected by rectangular faces is a solid prism; the figure formed by the bases and faces is a prism.
The prism with parallelogram faces is a parallelepiped.
The solid with a polygonal base and triangular faces meeting at an apex is a solid pyramid; the figure is a pyramid.
When a plane crosses a solid, the overlapping area is called the cross section.
The measure of space enclosed by a solid is volume.
The principle that solids with equal cross-sectional area at every height have equal volume is Cavalieri’s principle.
The volume of a prism is base area B times height h: V = B h.
The volume of a pyramid is one-third base area B times height h: V = (1/3) B h.
The solid with circular bases connected by a curved surface is a cylinder.
The solid with a circular base tapering to an apex is a cone.
The set of points at fixed distance from a center is a sphere.
The total area of faces (polyhedra) or lateral plus base (curved solids) is surface area.
The transformations in space that preserve volume and surface area are isometries in space.
The theorems about spheres and planes: a plane intersects a sphere in a circle (or point); the intersection is perpendicular to the radius at the center.
Undefined Terms
Term 12.17 Volume: The primitive measure of the amount of three-dimensional space enclosed by a solid. Analogous to distance in a three-dimensional space.
Formal Definitions
Definition 12.128 Polyhedra: Solids bounded by polygons. Singular is a polyhedron.
Definition 12.129 Prism: Two parallel bases having rectangular faces.
Definition 12.130 Parallelepiped: A prism with parallelogram faces.
Definition 12.131 Pyramid: Polygonal base, triangular faces to apex.
Definition 12.132 Cylinder: Circular bases, curved surface.
Definition 12.133 Cone: Circular base, extending to an apex.
Definition 12.134 Sphere: A solid consisting of all points at a fixed distance (radius) from a center; the three-dimensional analog of a circle.
Definition 12.135 Volume: Space enclosed by a solid.
Definition 12.136 Cross Section: Plane intersection with a solid resulting in a plane figure.
Definition 12.137 Surface Area: Total area of faces and/or surfaces.
Definition 12.138 Isometries in Space: Volume-preserving transformations.
Axioms
Axiom 12.49 Volume positivity: The volume of any non-degenerate solid is positive (zero only for degenerate cases with no interior).
Axiom 12.50 Volume additivity: The volume of a solid composed of non-overlapping sub-solids is the sum of their volumes.
Axiom 12.51 Congruence-volume axiom (implied): Congruent solids have equal volume.
Axiom 12.52 Cavalieri’s principle (accepted as an axiom here): Solids with equal cross-sectional areas at every height have equal volume.
Theorems
Theorem 12.30 Volume of Prism: V = B h.
Theorem 12.31 Volume of Pyramid: V = (1/3) B h.
Theorem 12.32 Sphere-Plane Theorem: A plane overlaps a sphere in circle.
Theorem 12.33 Volume of Cylinder: ![]() .
.
Theorem 12.34 Volume of Cone: ![]() .
.
Theorem 12.35 Volume of Sphere: ![]() .
.
Exercise 12.28:
a) Volume of a Prism (Basic): Given: A rectangular prism with base area B = 12 ![]() and height h = 5 m.
and height h = 5 m.
Find: Volume.
b) Volume of a Pyramid: Given: A square pyramid with base side s = 6 m and height h = 8 m.
Find: Volume.
c) Cavalieri’s Principle: Given: Two solids have equal cross-sectional area at every height.
Show: They have equal volume.
d) Cylinder Volume: Given: A cylinder with radius r = 3 m and height h = 10 m.
Find: Volume.
e) Cone Volume Given: A cone with base radius r = 4 m and height h = 9 m.
Find: Volume.
f) Sphere Volume: Given: A sphere with radius r = 5 m.
Find: Volume.
Exercise 12.29: Begin with Term 12.17 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each term, definition, axiom, and theorem.
Symmetry
With isometries as distance/area/volume-preserving transformations, we now explore how they combine to leave a figure unchanged. An isometry (or composition of isometries) that transforms a figure to itself is a symmetry of the figure. The collection of all symmetries of a figure forms what we can call the symmetry group.
Isometries that combine to leave a figure unchanged include:
Reflection over a line of symmetry
Rotation around a center of symmetry
Translation along a direction of symmetry
Glide reflection (reflection + translation)
For example, a square has:
4 reflections (over diagonals and segments connecting midpoints)
3 rotations (90°, 180°, 270°)
1 identity (do nothing)
Total: 8 symmetries that form what we call the dihedral group denoted ![]() .
.
A regular pentagon has 10 symmetries ![]() ).
).
An equilateral triangle has 6 ![]() ).
).
In three-space, a cube has 48 symmetries (rotations + reflections).
Symmetry groups are collections of symmetry operations closed under composition, with identity and inverses.
We will explore details of groups throughout the rest of the set of volumes.
Undefined Terms
Term 12.18 Orientation: The “handedness” of a figure (clockwise vs. counterclockwise); preserved or reversed by transformations.
Formal Definitions
Definition 12.139 Symmetry: Isometry transforming a figure to itself.
Definition 12.140 Symmetry Group: The collection of all symmetries of the figure; forms a group under composition (closed, has identity, inverses, associative).
Definition 12.141 Reflection Symmetry: Flip over a line/plane.
Definition 12.142 Rotation Symmetry: Turn around a point/axis.
Definition 12.143 Translation Symmetry: Slide in a direction.
Definition 12.144 Glide Reflection: Reflection + translation.
Definition 12.145 Identity (symmetry): The trivial symmetry that leaves every point unchanged (do nothing).
Terms/Definition 12.149 Dihedral Group ![]() : Symmetries of regular n-gon.
: Symmetries of regular n-gon.
Axioms
Axiom 12.53 Closure under composition: The composition of two symmetries of a figure is another symmetry of the figure.
Axiom 12.54 Existence of identity: Every figure has the identity transformation as a symmetry.
Axiom 12.55 Inverses exist: For every symmetry, there exists an inverse symmetry that undoes it (returns the figure to itself).
Theorems
Theorem 12.36 Composition of Symmetries: If ![]() and
and ![]() are symmetries,
are symmetries, ![]() is a symmetry.
is a symmetry.
Proof of Theorem 12.36: Let F be a figure. Let ![]() and
and ![]() be symmetries of F, so: S
be symmetries of F, so: S![]() transforms F to F and
transforms F to F and ![]() maps F to F. Both preserve distance.
maps F to F. Both preserve distance.
Let P be any point in F. If we apply ![]() to P is in F (because
to P is in F (because ![]() is symmetry of F). If we apply
is symmetry of F). If we apply ![]() to the transformed (by
to the transformed (by ![]() ) P, this is also in F (because
) P, this is also in F (because ![]() is a symmetry of F, and
is a symmetry of F, and ![]() applied to P is in F). Thus,
applied to P is in F). Thus, ![]() applied to P is also in F. Since P was arbitrary,
applied to P is also in F. Since P was arbitrary, ![]() transforms F to F.
transforms F to F.
Let P and Q be any two points. ![]() preserves distance, therefore
preserves distance, therefore ![]() applied to P and to Q is equal to PQ .
applied to P and to Q is equal to PQ . ![]() preserves distance, therefore
preserves distance, therefore ![]() applied
applied ![]() applied to P and to Q is equal to
applied to P and to Q is equal to ![]() applied to P and Q. So the composition
applied to P and Q. So the composition ![]() is equal to
is equal to ![]() applied to P and to Q is in turn equal to PQ. Therefore
applied to P and to Q is in turn equal to PQ. Therefore ![]() preserve distance.
preserve distance.
We conclude that ![]() preserve distance, and transforms F to F. Therefore
preserve distance, and transforms F to F. Therefore ![]() is a symmetry of F. QED
is a symmetry of F. QED
Exercise 12.30: Begin with Term 12.18 and copy it into your notebook. Reflect on its meaning for a few minutes. Note any thoughts that come to mind. How would you explain this to someone sitting in front of you. Write this down. Then do this for each term, definition, axiom, theorem, and proof.
Exercise 12.31:
a) Identify Reflection Symmetry: Given: A regular pentagon.
1) Draw all lines of reflection symmetry.
2) Count them.
b) Rotation Symmetry: Given: An equilateral triangle.
1) Find the center of rotation.
2) List all rotation angles (including 0°) that map it to itself.
c) Composition of Symmetries: Given: A square with: ![]() = reflection over vertical midline,
= reflection over vertical midline, ![]() = 90° rotation clockwise. Find
= 90° rotation clockwise. Find ![]() and
and ![]() . Are they the same?
. Are they the same?
d) Symmetry Group of a Rectangle: Given: A non-square rectangle. List all symmetries (reflections, rotations).
e) Glide Reflection: Given: An infinite zigzag line (like a sawtooth). Show a glide reflection (reflect + slide) is a symmetry.
f) Symmetry in 3D: Given: A cube.
1) Count rotation symmetries (around vertices, faces, edges).
2) Total symmetries = ?
Euclidean and Noneuclidean Geometry
With all of Euclidean geometry built on five postulates, we now explore what happens when one is changed. Euclidean geometry follows Euclid’s five postulates, including the parallel postulate: through a point not on a line, exactly one parallel line exists.
Non-Euclidean geometry modifies the parallel postulate:
Hyperbolic geometry: through a point, infinitely many parallels.
Elliptic geometry: through a point, no parallels.
In hyperbolic space, triangles have angle sums < 180°, and area grows with perimeter.
In elliptic space, triangles have angle sums > 180°, and great circles are straight lines.
Spherical geometry (elliptic) models the Earth’s surface: lines are great circles, parallels don’t exist except at the equator.
Hyperbolic geometry models saddle-shaped spaces.
Summary
Write your own summary of this chapter.
For Further Study
Walter J. Meyer, (2022), Geometry and Its Applications. CRC Press (3rd Edition). A very nice book. The first four chapters cover the contents of this lesson. This is a very readable.
George David Birkhoff, Ralph Beatley, (1940), Basic Geometry, Chelsea Publishing Company (3rd Edition 1959). This is a very readable text that reinforces logic and proof then extends it into geometry.
Serge Lang, Gene Murrow, (1983), Geometry A High School Course. Springer Science (2nd Edition (1988). This is a very good introductory text on geometry. Unlike a lot of Lang’s books, it does not suffer from excessive brevity.
Micheal Serra, (2008), Discovering Geometry An Investigative Approach. Key Curriculum Press. If you are confused by all of this, this book might be able to help you.
David W. Henderson, (1996), Experiencing Geometry on Plane and Sphere. Prentice Hall. This book very carefully develops the subject of geometry giving the reader an intuitive feel for the subject.
Euclidean Geometry: Points, Lines, and Planes (Khan Academy) Link: https://www.khanacademy.org/math/geometry/hs-geo-foundations/hs-geo-points-lines-planes/v/euclidean-geometry-introduction . Duration: 9 minutes. Covers basics of points, lines, planes, and Euclid’s postulates with physics ties (motion paths). Interactive for beginners.
Triangles and Angle Sum Theorem (3Blue1Brown) Link: https://www.youtube.com/watch?v=7dK4E5q8o2M . Duration: 12 minutes. Visual proof of angle sum (180°), with physics examples (projectile trajectories).
Circles and Tangents (Khan Academy) Link: https://www.khanacademy.org/math/geometry/hs-geo-circles/hs-geo-circle-theorems/v/circle-theorem-proof . Duration: 8 minutes. : Explains tangents, secants, and fundamental theorem with simple optics applications (light rays). Step-by-step proofs.
Transformations: Translations, Rotations, Reflections (Mathigon) Link: https://mathigon.org/course/transformations/introduction . Duration: 11 minutes. Hands-on isometries with symmetry in physics (particle motion, mirrors).
Volume and Surface Area of 3D Figures (Khan Academy) Link: https://www.khanacademy.org/math/geometry/hs-geo-solids/hs-geo-volume/v/volume-of-cylinders . Duration: 7 minutes. Formulas for prisms, pyramids, cylinders, spheres, with physics (displacement, buoyancy). Builds on Cavalieri’s principle.